クイックスペック
正確なリアルタイム合成データで、センサー認識のテストケースとカバレッジを強化します。SiLまたはHiLのコンテキストでマルチセンサーシミュレーションを設定して、あらゆる操作条件下でのADAS/AVシステムのパフォーマンスを保証します。
Synopsys and Ansys power the future of innovation—connecting silicon to systems.
Ansysは次世代の技術者を支援します
学生は、世界クラスのシミュレーションソフトウェアに無料でアクセスできます。
未来をデザインする
Ansysに接続して、シミュレーションが次のブレークスルーにどのように貢献できるかを確認してください。
Ansys AVxcelerateは正確なセンサーシミュレーション機能を提供し、実際の運転データや記録されたデータのみに頼るよりも迅速に、センサー認識を含む自律型システムをテストできます。
お使いの運転シミュレータを使用した現実に即した運転シナリオ
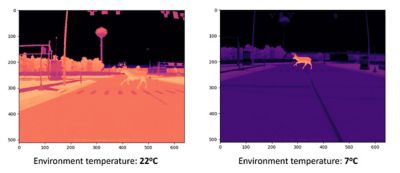
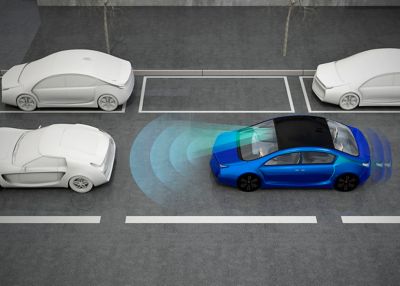
Ansys AVxcelerate Sensorsは、センサー認識を使用した自律型システムテストのために物理的に正確なセンサーシミュレーションを提供します。カメラ、LiDAR、レーダー、サーマルカメラ受光面の認識性能を向上させながら、テスト時間を短縮し、コストを節約します。AVxcelerateのリアルタイム機能を活用し、設計サイクルの進行に従って、Software-in-the-LoopまたはHardware-in-the-Loopのコンテキストで仮想テストを実行します。

正確なリアルタイム合成データで、センサー認識のテストケースとカバレッジを強化します。SiLまたはHiLのコンテキストでマルチセンサーシミュレーションを設定して、あらゆる操作条件下でのADAS/AVシステムのパフォーマンスを保証します。
2026年3月
AVxcelerate 26 R1では、NVIDIA Omniverseのデジタルツイン、リアルタイムでの光伝搬エンジンを使用したカメラシミュレーション、さらには正確なセンサーモデリングのためのビジュアルレーダーツールが提供され、システムからシリコンまでへのアプローチがさらに発展しています。ネイティブのNCAPシナリオと組み合わせることで、認識の忠実度とロバスト性が向上し、安全性に焦点を当てた厳格なADASおよび自動運転システムの妥当性確認が可能になります。

光伝搬エンジン(LPE: Light Propagation Engine)は、実際の光の伝搬をモデル化することで、明るい環境および悪条件下において物理的に正確なマルチスペクトルカメラセンシングを提供します。リアルタイムのフォトリアリスティックな描画性能、8メガピクセル撮像装置のサポート、極端な気象条件への対応、HiL対応のイメージインジェクションにより、LPEは信頼性の高いAVxcelerate SensorsのHardware-in-the-Loop検証を可能にします。

NVIDIA OmniverseをAVxcelerateに統合することで、デジタルツインの作成を大幅に簡素化しながら加速させる、統合された最先端のアセット準備パイプラインが構築されます。エンジニアは、3D環境をインポートまたは生成し、最新のUIを介してAnsysのマルチスペクトルデータベースから材料を直接適用して、AVxcelerateシミュレーション用のネイティブなアセットを作成できます。
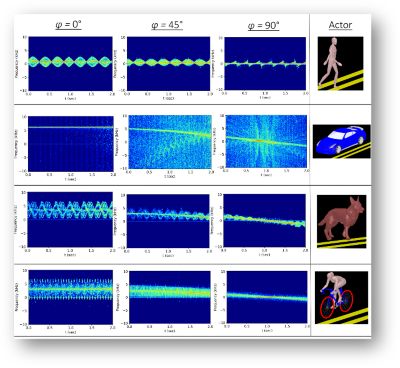
Sensors Labの新しいツールにより、TxおよびRxアンテナの効率的な配置と検証を可能にする視覚的アシストが提供され、複雑なレーダーセンサーを効率的に構成できるようになります。
このデモビデオでは、自動運転車(AV)向けのさまざまなAnsysソリューションを連携させて、LiDARやセンサー、機能安全、セーフティクリティカルな組込みコードなど、AVの設計とシミュレーションのための包括的なソリューションを提供する方法を紹介します。これらはすべて、バーチャルリアリティを介してシミュレーションされることで、物理的なロードテスト要件を軽減します。

「当社のカメラセンサー技術は、お客様の自律機能をサポートする業務になくてはならないものです。ADAS/ADテストおよび妥当性確認時にAnsys AVxcelerate Sensorsを使用することで、従来のシミュレーションでは踏み込むことのできなかった現実のシナリオを自信を持ってテストすることができました。結果の精度も完全に信頼できるものです。バランスの取れたソリューションを開発するための作業は今もなお続けられていますが、Ansys AVxcelerate SensorsとContinental社のカメラセンサーソリューションとのコラボレーションが、すでに有望な結果をもたらしています」
— Martin Punke博士、カメラ製品技術責任者(Continental社)
正確なリアルタイム合成データで、センサー認識のテストケースとカバレッジを強化します。SiLまたはHiLのコンテキストでマルチセンサーシミュレーションを設定して、あらゆる操作条件下でADAS/AVシステムのパフォーマンスを保証します。
先進運転支援システム/自動運転(ADAS/AD)技術において高レベルの精度を達成するために、Continental社はカメラセンサーをシミュレーションのターゲットにする必要があります。Continental社のエンジニアは、ADASまたはADシステムのトレーニング、テスト、妥当性確認を行うために、テストトラックや道路で実際の運転を行います。また、コンポーネントレベルのテストとシミュレーションも行いますが、この問題に取り組むには、限られたエンジニアリングシミュレーションソリューションしか利用できません。バランスの取れたソリューションを開発するための取り組みは継続していますが、Ansys AVxcelerate SensorsとContinental社のカメラセンサーソリューションとのコラボレーションが有望な結果をもたらしています。
このデモビデオでは、自動運転車(AV)向けのさまざまなAnsysソリューションを連携させて、LiDARやセンサー、機能安全、セーフティクリティカルな組込みコードなど、AVの設計とシミュレーションのための包括的なソリューションを提供する方法を紹介します。これらはすべて、バーチャルリアリティを介してシミュレーションされることで、物理的なロードテスト要件を軽減します。
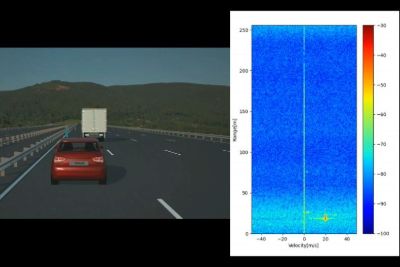
Ansys AVxcelerateは、ループ内のセンサー認識を使用した自律型システムテストのための物理的に正確なセンサーシミュレーションを提供します。カメラ、LiDAR、レーダー、サーマルセンサーの認識性能を向上させながら、テスト時間を短縮し、コストを節約します。

強力なレイトレーシング機能を活用して、センサーの振る舞いを再現し、専用のインターフェースを使用してセンサー出力を簡単に取得できます。
AVxcelerate Sensorsのリソースおよびイベント

2023 R2リリースでのAnsys AV Simulation(AVxcelerate)の新機能についてご紹介します。このリリースでは、カメラ、サーマルカメラ、レーダーのモデルとシミュレーションエコシステムが改善され、より正確で高忠実度のシミュレーションを実行できるようになります。

持続可能なビジネスモデルソリューションを実現するために、ADシステムの開発においてパフォーマンスと安全性の徹底したトレードオフを行っています。センサーおよびHMIの開発、システムの妥当性確認などの分野での重要な技術的課題に、Ansysのソリューションがどのように対処するのかをご確認ください。
車内センシングシステムの要件は、政府の政策や自動車安全評価機関のますます重要な部分となりつつあります。車内センシングシステムの要件を理解するとともに、車内監視システムの開発と妥当性確認のプロセスに対応する物理ベースのセンサーシミュレーションをご確認ください。
このデモビデオでは、自動運転車(AV)向けのさまざまなAnsysソリューションを連携させて、LiDARやセンサー、機能安全、セーフティクリティカルな組込みコードなど、AVの設計とシミュレーションのための包括的なソリューションを提供する方法を紹介します。これらはすべて、バーチャルリアリティを介してシミュレーションされることで、物理的なロードテスト要件を軽減します。
Ansysは、障がいを持つユーザーを含め、あらゆるユーザーが当社製品にアクセスできることがきわめて重要であると考えています。この信念のもと、US Access Board(第508条)、Web Content Accessibility Guidelines(WCAG)、およびVoluntary Product Accessibility Template(VPAT)の最新フォーマットに基づくアクセシビリティ要件に準拠するよう努めています。