规格速览
利用准确的实时合成数据,丰富您的传感器感知测试案例和覆盖范围。在SiL或HiL环境中设置多传感器仿真,以确保您的ADAS/AV系统在任何工作条件下的性能。
Synopsys and Ansys power the future of innovation—connecting silicon to systems.
使用您选择的驾驶模拟器模拟真实的驾驶场景
Ansys AVxcelerate Sensors提供精确的物理传感器仿真,以利用传感器感知进行自动驾驶系统测试。在提高摄像头、激光雷达、雷达和热成像摄像头传感器的感知性能的同时,节省测试时间和成本。利用AVxcelerate的实时功能,根据设计周期进程,在软件在环或硬件在环环境中执行虚拟测试。

利用准确的实时合成数据,丰富您的传感器感知测试案例和覆盖范围。在SiL或HiL环境中设置多传感器仿真,以确保您的ADAS/AV系统在任何工作条件下的性能。
2026年3月
AVxcelerate 2026 R1版本通过NVIDIA Omniverse数字孪生、实时光传播引擎摄像头仿真,以及用于精确传感器建模的可视化雷达工具,推进了从系统到芯片的仿真方法。结合原生NCAP场景,其可为ADAS和自动驾驶系统提供更高的感知保真度和以安全为中心的严格验证。

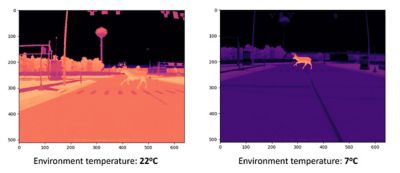
光传播引擎(LPE)通过对真实光传输进行建模,可在强光和恶劣条件下提供物理精确的多光谱摄像头传感。LPE具有实时、逼真的性能,支持800万像素成像器、极端天气场景和HIL就绪图像注入,可实现高置信度的硬件在环AVxcelerate传感器验证。

通过将NVIDIA Omniverse集成到AVxcelerate中,我们创建了统一、先进的资产准备流程,从而显著简化并加速了数字孪生的创建。工程师可以导入或生成3D场景,通过现代化UI界面直接应用Ansys多光谱数据库中的材料,并将可直接用于AVxcelerate仿真的原生资产准备好。
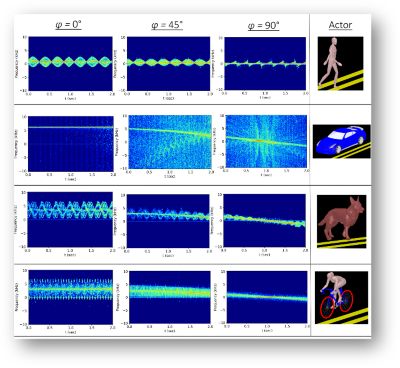
Sensors Lab中的新工具提供了可视化助手,从而简化复杂雷达传感器的配置,实现Tx和Rx天线的高效定位与验证。
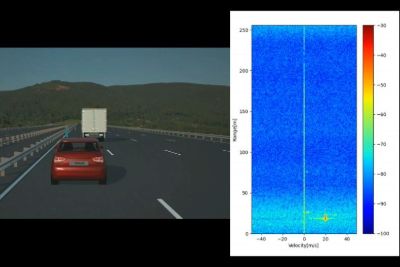
此演示视频展示了Ansys自动驾驶汽车(AV)解决方案如何协同工作,为AV的设计和仿真提供完整的解决方案,包括激光雷达和传感器、功能安全和安全关键型嵌入式代码。以上所有都通过虚拟现实进行仿真,以减少实际道路测试需求。

“我们的摄像头传感器技术对于支持客户自动驾驶功能的工作至关重要。Ansys AVxcelerate Sensors可以在ADAS/AD测试和验证的应用中,提供可信的、现实中难以实现的仿真场景,并且可以保证仿真结果的准确性。尽管全面解决方案的开发工作仍在进行中,但Ansys AVxcelerate Sensors与大陆集团摄像头传感器解决方案之间的合作已经取得了可喜的成果。”
——Martin Punke博士,摄像头产品技术主管/大陆集团
利用准确的实时合成数据,丰富您的传感器感知测试案例和覆盖范围。在SiL或HiL环境中设置多传感器仿真,以确保您的ADAS/AV系统在任何工作条件下的性能。
为了实现高级驾驶辅助系统/自动驾驶(ADAS/AD)技术所需的高精度,大陆集团针对其摄像头传感器进行仿真。大陆集团工程师在测试跑道或道路上进行实际驾驶,来训练、测试和验证ADAS或AD系统。此外,他们还进行组件级测试和仿真;然而,目前鲜有工程仿真解决方案可以解决此问题。尽管全面解决方案的开发工作仍在进行中,但Ansys AVxcelerate Sensors与大陆集团摄像头传感器解决方案之间的合作已取得了可喜的成果。
此演示视频展示了Ansys自动驾驶汽车(AV)解决方案如何协同工作,为AV的设计和仿真提供完整的解决方案,包括激光雷达和传感器、功能安全和安全关键型嵌入式代码。以上所有都通过虚拟现实进行仿真,以减少实际道路测试需求。
Ansys AVxcelerate提供精确的物理传感器仿真,以利用闭环中的传感器感知进行自动驾驶系统测试。在提高摄像头、激光雷达、雷达和热传感器的感知性能的同时,节省测试时间和成本。

受益于强大的光线追迹功能,可重新创建传感器行为,并通过专用接口轻松检索传感器输出。
AVxcelerate Sensors资源与活动

欢迎加入我们,了解Ansys自动驾驶仿真(AVxcelerate)2023 R2版本的新功能和特性。在该版本中,我们对摄像头、热成像摄像头和雷达模型以及仿真生态系统进行了改进,使用户能够执行更准确、更高保真度的仿真。

对于可持续的业务模式解决方案,AD系统开发需要在性能和安全性之间进行大量权衡。了解Ansys解决方案如何应对传感器和HMI开发,以及系统验证等领域的关键技术挑战。
车内传感系统的相关要求,逐渐成为政府政策和汽车安全性评级机构必不可少的一部分。了解车内传感系统相关要求,并观看基于物理的传感器仿真,以了解车内监控系统的开发和验证流程。
此演示视频展示了Ansys自动驾驶汽车(AV)解决方案如何协同工作,为AV的设计和仿真提供完整的解决方案,包括激光雷达和传感器、功能安全和安全关键型嵌入式代码。以上所有都通过虚拟现实进行仿真,以减少实际道路测试需求。
要让包括残障人士在内的所有用户都能访问我们的产品,这一点对于Ansys而言至关重要。因此,我们始终致力于遵循基于美国访问委员会(第508节)、Web内容可访问性指南(WCAG)和当前自愿产品可访问性模板(VPAT)格式的可访问性要求。