Ansys博客
December 3, 2021
如何为自动驾驶汽车选择合适的传感器
1885年,当全球首辆“汽车(motorwagen)”问世时,人们认为汽车有一天会实现自动驾驶的想法是可笑的。现在,在这个数字传感器能够超越人类感知运动、距离和速度能力的时代,辅助驾驶和自动驾驶汽车已成为现实。
在组合使用包括摄像头、激光雷达、雷达和超声波在内的传感器技术时,车辆可以对周围环境做出全面的深度判断,从而可在几乎没有或根本没有人为干预的情况下安全行驶。
但是,作为工程师和设计人员,确定这些传感器的最佳组合,满足最终用户的需求(包括安全性、功能性和价格),需要仔细考虑每种传感器的作用、功能和局限性。
传感器的汽车应用示例包括:
- 自动紧急制动
- 盲点警示
- 车道偏离警告
- 车道居中
- 自适应巡航控制
- 交通堵塞司机
- 无人驾驶出租车及货车
有哪四种自动驾驶传感器?
1.摄像头
高清数字摄像头不仅可帮助车辆“观察”周围环境,而且还可对周围环境进行解读。当在车辆周围安装多个摄像头时,360°视角有助于车辆检测其附近的物体,如其它车辆、行人、道路标记以及交通标志等。
为了满足不同的设计需求,需要考虑多种类型的摄像头,包括近红外摄像头、VIS摄像头、热成像摄像头以及飞行时间摄像头等。与大多数传感器一样,摄像头在用于相互补充时效果最佳。
- 近红外摄像头:近红外摄像头依靠可见范围以外的光线,通常与LED等近红外发射器结合使用
- VIS摄像头:根据可见光的反射识别物体
- 热成像摄像头:通过物体发射的红外能量检测物体
- 飞行时间摄像头:测量摄像头与拍摄对象之间的距离

摄像头非常适合操控与泊车、车道偏离以及识别驾驶员走神等情况。
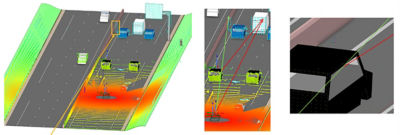
2.激光雷达
激光雷达代表“光探测与测距”,是一项远程传感器技术,使用光脉冲扫描环境并生成三维环境。与声纳原理相同,但激光雷达使用的是光,而不是声波。在自动驾驶汽车中,激光雷达会实时扫描周围环境,以免车辆发生碰撞。
激光雷达的组件:
- 发射器:向周围环境发射脉冲光波并通过扫描来测量光从物体反射回来所需的时间,以判断距离和深度
- 接收器:捕获反射的光波,了解某个物体的形状、大小、速度和距离
- 信号处理:编译和解析数据
激光雷达可以非常准确地深度感知和确定物体的存在。它可以在诸如夜间或雨雾等恶劣环境下“看”得很远。 它不仅可识别它所感知到的物体,而且还可对其进行分类,因此能够辨别松鼠和石头等物体之间的差异并据此预测其行为。
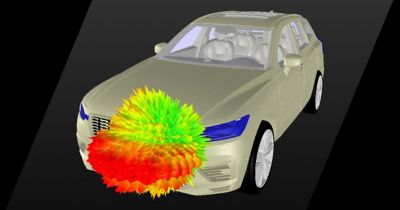
3.雷达
雷达代表“无线电探测与测距”。这种传感器以电磁波的形式发出短脉冲,以检测环境中的物体。一旦电磁波击中物体,它们就会被反射并反弹回传感器。在自动驾驶汽车中,雷达用于识别其它车辆和大型障碍物。
雷达的组件:
- 发射器:向指定的方向发送无线电信号
- 接收器:捕获物体反射的无线电波
- 接口:将无线电数据转换为对驾驶员有利的信息
由于不依靠光,因此无论天气状况如何,雷达都能良好运行,其主要用于启用巡航控制及防撞系统。
4.超声波
雷达使用无线电波,激光雷达使用光脉冲,而超声波传感器则通过发送会被反射回传感器的短超声波脉冲来评估环境中的物体。它们极具成本效益,在探测固体危险时表现出色,通常用在汽车保险杠上,以便在停车时提醒驾驶员注意障碍物。为了在辅助驾驶应用中取得最佳效果,超声波传感器通常与摄像头结合使用。
关注的实际情况:许多最好的超声波传感器都存在于自然界中。蝙蝠、海豚和独角鲸都使用超声波来识别物体(回声定位)。
单个传感器比较表
| 摄像头 | 雷达 | 超声波 | 激光雷达 | |
| 优势 | 高清彩色图像、非常详细逼真 | 3D信息、紧凑、远程 | 紧凑、无活动部件、不受光线或天气影响 | 不受天气影响、远程高清 |
| 弱点 | 在恶劣天气及光线不足的条件下性能不佳 | 分辨率低、无彩色 | 覆盖范围有限 | 无彩色、价格高 |
| 成本 | 价格低 | 价格低 | 价格低 | 价格昂贵 |
如何选择合适的传感器组合
单个传感器各有其优势,而传感器信息之间的交互作用可实现辅助驾驶。而且随着汽车迈向完全自动驾驶时代,选择合适的传感器组合对于实现自动驾驶所需的安全标准尤为重要。
对于最高级别的安全性和性能需求,摄像头、雷达、激光雷达和超声波之间的传感器融合不仅能最大限度提升每种传感器的优势,同时还能弥补其它传感器的不足。例如,激光雷达单独提供车道跟踪时效果很差,但激光雷达和摄像头的组合在该功能上非常有效。
组合是否得当主要看以下几个因素:
- 传感器的预期功能是什么?例如紧急制动、防撞、泊车辅助
- 该功能的要求是什么?例如需要检测100米远的车辆
- 该功能可能会遇到哪些极端情况?例如大雾等恶劣天气情况
- 期望的功能是用于为驾驶员提供支持还是实现驾驶自动化?
- 哪种传感器组合的成本最低?
- 所需的传感器数量将对整体设计产生怎样的影响?
通过仿真测试传感器组合
为了确保原型汽车能够随时投入实际使用,传感器必须通过数量庞大的不同用例设计测试。
通过针对摄像头、激光雷达、雷达和超声波传感器提供基于物理场的逼真实时响应,Ansys仿真平台可为工程师提供验证其自动驾驶系统设计安全性所需的全部信息。
在启动设计探索时使用Ansys仿真,可准确了解每种传感器组合的实际性能。随后,您可基于自己的目标,为项目评选出最佳传感器组合。
如欲进一步了解如何使用基于物理场的传感器仿真提高自动驾驶汽车的安全性,请观看我们的点播网络研讨会:通过大规模使用基于物理场的传感器仿真提高自动驾驶汽车的安全性。