-
-
学生向け無料ソフトウェアにアクセス
Ansysは次世代の技術者を支援します
学生は、世界クラスのシミュレーションソフトウェアに無料でアクセスできます。
-
今すぐAnsysに接続!
未来をデザインする
Ansysに接続して、シミュレーションが次のブレークスルーにどのように貢献できるかを確認してください。
国および地域
無料トライアル
製品およびサービス
リソースとトレーニング
当社について
Back
製品およびサービス

先進運転支援システム(ADAS: Advanced Driver Assistance System)や自動運転車(AV: Autonomous Vehicle)などのテクノロジーにより、自動車を取り巻く環境は大きく変化しています。実際に2023年だけで、14のADAS機能のうち10の機能が市場浸透率50%を超えたと推定されています。しかし、この自動運転テクノロジーの成功が続くかどうかは、歩行者や自転車に乗る人など、いわゆる交通弱者(VRU: Vulnerable Road User)を検出できる正確で信頼性の高いセンサーシステムを開発できるかどうかにかかっています。
さらに、いくつかの安全規制が追加されたことで、メーカーはさらに厳しくなる安全要求に対応しながら、レーダーセンサーの開発コストを低く抑えるという難題に対処しなければなりません。そうした安全規制の1つが、あらゆる車両区分で自動緊急ブレーキ(AEB:Automated Emergency Braking)を標準機能として搭載することを義務付けるNHTSA FMVSS 127です。
OEMメーカーやTier 1サプライヤーにとって、このNHTSA FMVSS 127に関する課題となるのは、高性能レーダーデバイスの安全性とコストの両面で要件しきい値を満たすことです。
周波数変調連続波(FMCW: Frequency Modulated Continuous Wave)レーダーは、低コストで開発でき、長距離にわたって十分な検出能力を発揮することで、そうした要件を満たす選択肢の1つとなります。ただし、このテクノロジーにより、レーダーの信号に位相ノイズ(微小かつランダムな偏移)が生じることがあります。この短期かつランダムな変動は、レーダーシステムの性能低下を招き、結果として車両の安全性にも悪影響を及ぼします。
これに対処するために、自動運転車のシミュレーションソフトウェアであるAnsys AVxcelerate Sensors 2025 R2では、新しい位相ノイズモデリング機能が実装され、実際の運用条件下でFMCWなどのレーダーシステムをより正確にテストできるようになりました。
ノイズとは
VRUの検出にはFMCWレーダーが不可欠です。しかし、FMCWレーダーにより、不安定な位相変化(局部発振器(LO: Local Oscillator)の信号位相におけるランダムな変動)が生じ、位相ノイズが発生することがあります。
位相ノイズは、レーダーセンサーの電圧制御発振器(VCO: Voltage-Controlled Oscillator)によって生成されるチャープ信号におけるわずかな位相偏移によって生じます。こうした偏移がレーダー信号でのサイドローブを引き起こし、望ましくない放射パターンが捕捉されます。レーダー検出中は、これらのサイドローブスキャンにより、特に長距離において小さな物体を正しく検出できないことがあります。
たとえば、大型トラックの近くにいる歩行者を検出するシナリオで、位相ノイズの影響により歩行者を正しく検出できなければ、安全上の深刻なリスクにつながります。
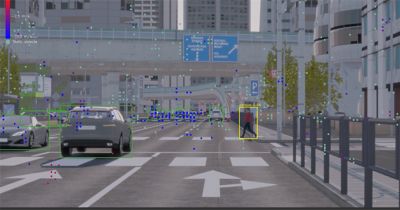
ADASやAVに採用されるレーダーセンサーは、高速道路などの課題が多い環境や見通しの悪い都市部でも、歩行者や自転車(VRU)などを含め、さまざまな物体を検出するように設計されています。
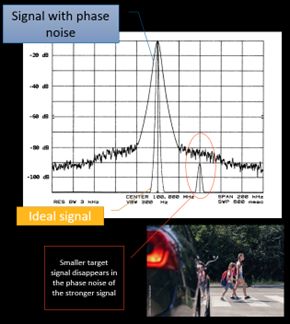
信号の位相ノイズマスキングが大きいために対象を検出できない
レーダーシステムが実際の運用環境で効果的に動作することを保証するためには、その開発時に位相ノイズを考慮することが不可欠となります。レーダー認識をテストするには、シミュレーション環境に適した徹底的な性能解析が必要です。位相ノイズやその他の環境的欠陥を省いた過度に理想化されたシミュレーションでは、こうした実環境条件を再現できず、正確な性能評価を行うことができません。
たとえば、レーダーセンサーの性能は、ノイズや干渉が存在しない制御されたテスト環境では完璧に見えるかもしれませんが、実環境のシナリオでは、レーダー信号にわずかでも変動が生じると検出精度は損なわれます。
このような変動は、主に信号の劣化、周囲の物体からのマルチパス干渉、あるいはレーダー装置内部で発生した電子ノイズなどの要因によって生じます。ノイズモデリングを導入しなかった場合、エンジニアは実環境条件下で十分に性能が発揮されるレーダーシステムを開発できず、特に緊急ブレーキや衝突回避が要求される危機的な状況下において、安全性と性能が損なわれる危険性があります。
真価が問われる認識および位相ノイズのテスト
位相ノイズは、周波数にわたってノイズがどのように分布されるかを示すパワースペクトル密度(PSD: Power Spectral Density)によりその特性が評価されます。各センサーメーカーは、このPSDデータをレーダーのスペックシートで公開しており、エンジニアはそのデータを利用することで、シミュレーションで位相ノイズを正確にモデル化できます。
このノイズは、主に次の2つの方法でモデル化できます。
- ペデスタルモデル: シミュレーションにスペックシートのPSDを直接使用します。
- 区分的線形モデル: より詳細なシミュレーションとセンサー定義のために、測定されたPSDデータを使用します。
Ansys AVxcelerate Sensorsのシミュレーション環境に位相ノイズデータを組み込むことで、メーカーはレーダーシステムが実際の運用条件下で適切に機能することを保証できるようになります。さらに、レーダーの性能低下を招くような位相ノイズやその他の欠陥をシミュレーションできるように設計された高度なノイズモデルも採用されました。これらのモデルを活用することで、ノイズのような欠陥が検出能力の低下につながる、実際の運用環境に非常に近い条件下でレーダーシステムをテストすることができます。
メーカーは、Ansys AVxcelerate Sensorsを導入して位相ノイズを正確にシミュレーションすることで、複雑で動的な環境であってもレーダーが確実に動作するようにシステムを微調整できるようになります。
近い将来、ADASおよびAV技術の普及により、FMVSS 127で策定されているAEB向けの規格を含め、走行するほぼすべての車両で車両認識に関する厳しい安全規格を満たすことが義務付けられることになるでしょう。コストを抑えつつ、ノイズの影響を受けにくいより高度なレーダーシステムを開発して導入することが必須となります。
シミュレーションで位相ノイズを正確に特定して対処できるようになることで、高速道路や見通しの悪い都市部まで、さまざまな運転条件下で付近の物体を検出し、最適に動作できるレーダーセンサーを開発できるようになります。こうした改善を通じて、メーカーは安全規制を満たすよりロバストなFMCWベースのレーダーシステムを開発して、最もコストが重視される自動車業界においても信頼性の高い性能を達成できるようになります。
シミュレーションにより安全で自律性の高い未来を実現
特に高速走行のような複雑な環境でレーダーがVRUを確実に検出するためには、位相ノイズを考慮しなければなりません。位相ノイズを無視すると、対象を正しく検出できず、安全上の深刻なリスクにつながります。位相ノイズをシミュレーションすることで、メーカーはレーダー性能とコスト効率のバランスをとることができ、手頃な価格の車両でもFMVSS 127などの規制安全規格を満たすことができます。
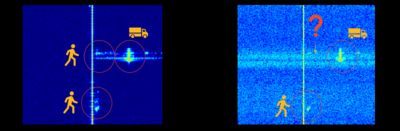
ノイズを考慮しないレーダーシミュレーション(左)では、2人目の歩行者は検出される。しかし、熱雑音と位相ノイズを考慮した場合(右)には、運用環境条件下でのテストと同じように、2人目の歩行者は検出されない。
安全規制を満たし、VRUの安全を確保できるより安全な自動運転の未来を切り拓くためには、FMCWレーダーのような低コストで高性能なテクノロジーの導入を成功させることが鍵となります。AVxcelerate Sensors 2025 R2のリリースにより、自動運転分野で位相ノイズをより効果的にシミュレーションし、運用環境の条件下で最適に機能するレーダーシステムを開発することが可能です。
AVxcelerate Sensorsの詳細についてはこちらをご覧ください。


Advantageブログ
Ansys Advantageブログでは、専門家が投稿した記事を公開しています。Ansysのシミュレーションが未来のテクノロジーにつながるイノベーションをどのように推進しているかについて最新の情報をご覧ください。