-
-
学生向け無料ソフトウェアにアクセス
Ansysは次世代の技術者を支援します
学生は、世界クラスのシミュレーションソフトウェアに無料でアクセスできます。
-
今すぐAnsysに接続!
未来をデザインする
Ansysに接続して、シミュレーションが次のブレークスルーにどのように貢献できるかを確認してください。
国および地域
無料トライアル
製品およびサービス
リソースとトレーニング
当社について
Back
製品およびサービス

When designing complex air missions, it becomes very important to understand how your system will perform and interact with other systems at a mission level. The Ansys Systems Tool Kit (STK) Aviator capability enables users to build out flight trajectories with realistic attitude that fly within a performance model envelope. As systems advance in complexity and the emerging demands of autonomous systems expand, there will be a growing need to not only understand the attitude of an aircraft but also simulate the flight controls and control surfaces of the vehicle as it flies its mission.
Coming to STK version 13.0, the Aviator tool is adding an exciting new performance model and procedure to enable you to fly trajectories based upon control inputs. Shipped with STK software will be two pre-installed performance models. The first is the “Fighter Aero” performance model. This is a generalized F16 based off a model from the book “Aircraft Control and Simulation: Dynamics, Controls Design, and Autonomous Systems” by Brian L. Stevens, et al. The second is the “Transport Aero” model, which is based off a Research Civil Aircraft Model (RCAM). Users will also be able to plug into the Aviator performance model library to create high-fidelity representations of their own systems.
Once you have this dynamic performance model defined, users can use the “Dynamic Control Trim Site” tool to define a trim condition to begin your mission. You can also pick up from the end of a previous procedure to start a new Dynamic Control procedure. This procedure extends the concepts from Aviator’s Basic Maneuver to a full six degrees of freedom (DOF). When using this procedure, the vehicle will be controlled by elevator, aileron, rudder, and throttle control inputs to model fixed-wing aircraft.

Two aircraft flying with the new Dynamic Control procedure
From the Dynamic Control procedure, users will have the ability to define two different strategies. The first strategy is the “Trim Hold” feature. “Trim Hold” will maintain the initial dynamic state of the aircraft as defined by the site. From this trim condition, you can put doublets into the system for a given time and magnitude. These doublet options include longitudinal, lateral, yaw, and thrust.
The second strategy that comes with the Dynamic Control procedure is the VFX strategy. This strategy is a controller based on the paper “Aircraft fault-tolerant trajectory control using Incremental Nonlinear Dynamic Inversion.” The controller takes in time series inputs of velocity, course, and flight path angle. These inputs can be linearly interpolated or taken in as a step command. Once you have your inputs, the controller will attempt to fly the aircraft at those inputs. The aircraft will fly within the limits of the performance model and determine the correct control inputs needed to perform the procedure.
Beyond the off-the-shelf performance and procedure modeling that comes with STK 13.0, users will have the ability to use agents outside of STK software, such as the Ansys SCADE platform, Simulink, or Python via GRPC, to feed the control inputs that propagate the Aviator route. This will enable users to simulate realistic flight controls to mimic their own autopilot systems and drive their mission simulations.
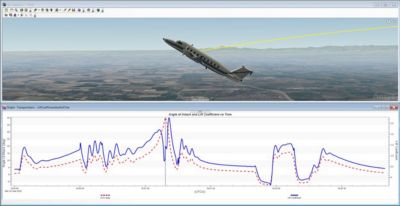
An aircraft approaching stall in Ansys Systems Tool Kit (STK) software with the new Dynamic Control procedure
The Aviator tool in STK software has long been an industry-leading solution for realistic trajectory generation. This new feature unlocks even greater potential for users to increase the fidelity of their mission simulations and will support engineers as they face the growing need for six DOF within a mission environment.
Learn more about STK software and other digital mission engineering tools from Ansys.


The Advantage Blog
The Ansys Advantage blog, featuring contributions from Ansys and other technology experts, keeps you updated on how Ansys simulation is powering innovation that drives human advancement.