Synopsys and Ansys power the future of innovation—connecting silicon to systems.
-
-
学生向け無料ソフトウェアにアクセス
Ansysは次世代の技術者を支援します
学生は、世界クラスのシミュレーションソフトウェアに無料でアクセスできます。
-
今すぐAnsysに接続!
未来をデザインする
Ansysに接続して、シミュレーションが次のブレークスルーにどのように貢献できるかを確認してください。
無料トライアル
製品およびサービス
リソースとトレーニング
当社について
Back
製品およびサービス
車両接近通報装置(AVAS)とは
車両接近通報装置(AVAS: Acoustic Vehicle Alerting System)は、独自の通報音を生成し、それを車載スピーカーから再生して、他の道路利用者に車両の位置・速度・進行方向を知らせる車載モジュールです。この技術は、低速走行時にほぼ無音となる電気自動車(EV)やハイブリッド車の危険性を指摘した安全専門家や視覚障害者の支援者の声を受けて開発されました。
自動車の場合、一般的には次の3つの音源から音が発生します。
- エンジンノイズ: ホイールにトルクを与える機械システムでは何らかのノイズが生じます。特に内燃機関ではノイズレベルが非常に高くなります。各種の冷却ファンからも音が発生しますが、ファンは常に作動しているわけではありません。また、高速走行時には電動モータがうなり音を発し、燃料電池エンジンにはエンジンノイズの原因となる送風機やポンプが搭載されています。
- 転がりノイズ: 走行の際、タイヤが路面と接するときに音が発生します。音のレベルは、タイヤの設計、路面、車両の速度によって異なります。
- 空力ノイズ: 車両の周りを流れる空気は、高速では乱流を生じさせますが、歩行者にとっては車両接近の手がかりとなる音にもなります。ただし、低速では空力ノイズはほとんど発生しません。
道路沿いを歩く人や道路を横断する人、自転車利用者、道路近くにいる子供たちは、こうした音を車両の接近を知らせる合図として活用します。これは、視覚障害がある人や、歩行中にスマートフォンを見たり他の人と話したりして注意が散漫になりがちな人にとって、特に重要です。電気自動車が普及し始めた際、低速走行時にほぼ無音であることが歩行者の安全上の問題となりました。米国運輸省道路交通安全局(NHTSA: National Highway Traffic Safety Administration)が実施した2009年の調査では、電動モータを搭載したハイブリッド電気自動車は、歩行者との衝突リスクが2倍、自転車との衝突リスクが1.7倍に上ることが明らかになりました。ただし、速度が約12.4mph(20kph)になると、走行音や空力ノイズは十分に聞こえるほど大きくなるため、通報音は不要になります。
車両接近通報装置の目的と関連するモジュール
自動車メーカーは、以下の3つの理由により、電気自動車やハイブリッド自動車にAVASモジュールを搭載しています。
- 歩行者の安全: AVASで生成される通報音は、歩行者や自転車に乗る人など、交通弱者との衝突のリスクを軽減します。この通報音は、横断歩道を渡る人、駐車中の車両付近を歩く人、バックしている車両の背後を通過する人などの安全確保において、非常に有益となります。
- サウンドブランディング: 低速走行時の安全性を確保するための音の生成は、自動車メーカーにとって新たな機会ももたらします。自動車メーカーは、AVASに独自のサウンドを作成することで、自社車両の統一した基準を設けることができます。
- 規制準拠: 多くの国で、低速走行時にエンジン音が発生しない車両にはAVASの採用が義務付けられています。これには、バッテリ式電気自動車(BEV: Battery Electric Vehicle)、プラグインハイブリッド車、ガソリン-電気ハイブリッド車、そして一部の水素燃料電池自動車が含まれます。
AVASには、一般的に、以下のモジュールが含まれています。
- コントローラエリアネットワーク(CAN)バス: 指定された音量と周波数の組み合わせで適切なサウンドを生成するために、AVASは車両の動作状態を把握するための情報を受け取る必要があります。この情報は、車両のCANバスから取得します。CANバスは、車両の速度、ギア設定、アクセルとブレーキの位置、周囲の騒音、加速度を測定または捕捉するためのセンサーやデバイスに接続されています。
- 処理: 装置の頭脳に相当します。電子制御ユニット(ECU)、サウンドエンジン、アンプ、CANバスインターフェースで構成されています。
- 出力: 処理モジュールでは、センサー入力を使用し、装置の出力モジュールを介して通報音を発します。AVASの出力モジュールの主なコンポーネントは、スピーカー、配線、ハウジング、ブラケットです。一部の車両では、ボンネットなど、車両に既存のパネルのアクティブ振動を利用して通報音が発せられます。
車両接近通報装置の開発を促す規制
内燃機関を動力とする車両の騒音に関する初期の規制では、騒音公害の低減とドライバーの意識向上に重点が置かれていました。しかし現在では、安全性を向上させる通報音の生成をEVや関連車両に義務付けるためのさまざまな規格が制定されています。このような歩行者警告システムに関する規制には、2つの目的があります。
- 道路利用者を保護するための法的手段をもたらし、車両エンジニアに一貫したガイドラインを提供します。
- 規制には、エンジニアが設計目標として活用できる測定値が定義されています。
国または地域ごとにAVASの安全基準が定められていますが、それらのほぼすべてで、特定の車両速度について以下のように規定されています。
- 可聴: さまざまな速度でのノイズの音量は、実環境で遭遇する状況において十分に聞こえるレベルであること
- 認識可能: 車両の近くにいる人が、ノイズを時間の経過とともに車両の位置と方向を把握するための合図として識別できること
- 関連性: 生成されたサウンドにより、速度、静止状態、バック走行など、音に基づく追加の手がかりを得られること
一般的に適用されるAVAS規制
以下に、車両接近通報装置に広く適用される規制やガイドラインを示します。
国連規則第138号(UN r138)
この国際規格は、日本、欧州連合、オーストラリア、英国を含む大多数の国で採用されています。UN r138は、テストに加え、音量と周波数に関するエンジニア向けの情報を含む包括的な規格です。対象となるAVASシステムの重要な要件は、以下のとおりです。
- 起動から12mph(20kph)まではサウンドを発する。
- バック走行時に、最小音量以上で認識可能な後退時警報音を発する。
- 車両が静止状態のときはサウンドを一切発しない。
- 異なる速度範囲について特定の最小音量レベルでサウンドを発する。
- 特定の範囲内で少なくとも2つの周波数を生成するトーンを作成する。
- 速度が1kph変化するごとに、加速時(周波数増加)と減速時(周波数低下)を示すべく、生成サウンドのピッチを少なくとも0.8%変化させる。
米国連邦自動車安全基準(FMVSS)141
米国で走行する車両総重量定格(GVWR: Gross Vehicle Weight Rating)が10,000ポンド以下のハイブリッド車および電気自動車は、FMVSS 141「ハイブリッド車および電気自動車の最小音要件」に準拠する必要があります。
対象となるAVASモジュールの重要な要件は、以下のとおりです。
- 起動から18.64mph(30kph)まではサウンドを発する。
- バック走行時に、最小音量以上で認識可能な後退時警報音を発する。
- 車両が静止状態およびギアが入っている状態のときにサウンドを発する。
- 異なる速度範囲および周波数帯について特定の最小音量レベルでサウンドを発する。
- 10kphの速度変化ごとに、加速と減速に伴って音量を3dBの割合で変化させる。
- 特定の範囲内で少なくとも2つ、最大で4つの周波数を生成するトーンを作成する。
- 特定の型式、モデル、年式、ボディタイプ、トリムレベルについて同じサウンドを発する。
中国国家推奨規格GB/T 37153
中国の規格は、UN r138にほぼ準拠しています。ただし、中国の都市部では周囲の騒音レベルが高いため、国連規格よりも2dB大きな音量が義務付けられています。また、運転者が一時停止スイッチでAVASモジュールをオフにすることも認められています。
SAE J2889-1およびISO 16254
密接に関連しているこれらの業界規格は、法律上は義務付けられていません。これらの規格では、車両接近通報装置で生成されたサウンドの測定方法が指定されています。規格には、テスト用路面、バックグラウンドノイズ補正、マイク配置に関するガイドラインが含まれています。
AVASのサウンドの設計方法
AVASのサウンドを作成するには、エンジニアリング、美観、イノベーション、効率性、安全性のニーズを1つのクリエイティブな取り組みとしてまとめ、矛盾することが多いこれらの目標をすべて満たす製品を開発することが必要です。そのため、自動車メーカーはサウンド設計者の専門知識を活かしてAVASのサウンド設計を進めています。
チームごとに採用するアプローチは異なりますが、共通するのはブランディングの目標、規制、追加の安全要件から始めて、さまざまなサウンドを試すことです。サンプルサウンド、デジタル特殊効果、楽器、または身の回りの物を使用して、交通安全を向上させ、規制要件を満たし、会社のブランドイメージを構築できる独自の音響の組み合わせを探ります。
音量と周波数の要件は規則に基づいて指定されますが、サウンドを用いたブランドイメージの強化は反復的なプロセスです。まず、サウンドエンジニアが方向性を決められるように、ブランドを象徴するイメージなどのブレインストーミングから始めます。たとえば、風や水のような自然由来のサウンドを採用できます。あるいは、映画のように力強く圧倒的なサウンドを望むこともあるでしょう。ブランドによっては、従来のガソリン車の特徴的なエンジン音をそのままEVでも採用したいと考えるかもしれません。
AVASの例1: 落ち着きと調和
AVASの例2: 滑らかな回転音
AVASの例3: スポーティで未来的
ブランドビジョンが決まると、次はAVASが生成するサウンドと車両の作動音がどのように影響し合うかを検討します。サウンドは互いに補完することもあれば、相互にマスキングされることもあります。また、サウンドエンジニアがもう1つ重視するのは、サウンドの組み合わせが調和しているか不調和かという点です。さらに、人々が音をどのように知覚するかを調べる必要もあります。たとえば、Jaguar社は宇宙機にインスパイアされたサウンドを採用しましたが、その車両音を聞いた歩行者が空を見上げるという予期せぬ反応を示した有名な事例があります。
シミュレーションによるAVASのサウンド設計の向上
これらの複雑な要素に対応するため、サウンド設計者は、サウンド設計ポストプロセスソフトウェアであるAnsys SoundなどのシミュレーションソフトウェアをAVASのさまざまなサウンドアイデアの実験、テスト、最適化そして検証に活用しています。ベースとなるサウンドセットから始めて、音色、ピッチ、ラウドネスなどの特性を変化させ、新しい可聴サウンドを作成できます。その後で、モータの回転数、速度、加速度、トルクなどの運転パラメータを調整して、サウンドがどのように変化するかを調査します。このソフトウェアを使用すると、パラメータを簡単に変更して、ラボ、ドライビングシミュレータ、または車載のAVASハードウェアを介してリアルタイムでサウンドを聞くことができます。Ansys Soundなどのシミュレーションツールを使用することで、エンジニアは物理的なプロトタイプに加えた変更を数週間も待つことなく、迅速に反復作業を行えるようになります。
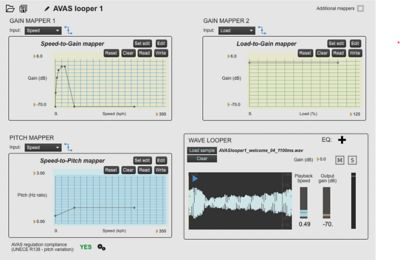
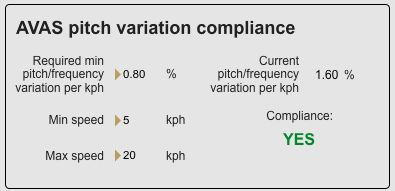
サウンドチューニング(左)と車両接近通報装置(AVAS)のコンプライアンスチェックを実行するAnsys Soundの画面
AVASの今後の課題と機会
車両接近通報装置は、EVやハイブリッド車の安全機能としてすでに確立されていますが、EVの普及がさらに進むにつれ、新たな課題が生じると予想されます。その中で最も重要なのは、新しいタイプの騒音公害です。市街地を走るEVの台数が増えるにつれて、それらのAVASスピーカーから発せられるサウンド自体が都市部の騒音公害につながる可能性があります。また、メーカーによってサウンドが大きく異なるため、複数の車両が同時に通報音を発した場合、歩行者の注意がそれる恐れもあります。さらには、2台以上の車両の通報音が混ざると、調和の取れたオーケストラではなく、初心者による楽器演奏のような耳障りな音と感じられるかもしれません。
設計チームが取り組む機能強化には、以下のようなものがあります。
- 通学路、病院、歩行者専用道路、あるいは郊外など、環境によって変化するアダプティブなサウンドスケープ
- AVASが都市インフラのセンサーや歩行者のスマートフォンと連携するスマートシティインテグレーション
- 他の車両を含むその他の騒音源の音を車両が感知し、より調和の取れた音になるよう音響を自動調整する機能
- ノイズの多い環境に対応するためのAVASと視覚信号の組み合わせ
それと同時に、EVのさらなる普及や他のテクノロジーメガトレンドの発展は、新たな機会ももたらします。たとえば、自動運転車であれば、クラクションを鳴らしたり、乗客に到着を知らせたりするドライバーがいないため、追加の警告音が必要になります。また、人工知能(AI)を活用すると、さらに多くのサウンドオプションを探索して合成し、より高速かつ正確にテストできるようになります。
関連リソース
さあ、始めましょう
エンジニアリング課題に直面している場合は、当社のチームが支援します。豊富な経験と革新へのコミットメントを持つ当社に、ぜひご連絡ください。協力して、エンジニアリングの障害を成長と成功の機会に変えましょう。ぜひ今すぐお問い合わせください。