Synopsys and Ansys power the future of innovation—connecting silicon to systems.
主題詳細資料
什麼是光學雷達?
光學雷達,或稱光學偵測和測距,是一種使用光脈衝來偵測環境的技術。光學雷達能應用在家庭安全系統、條碼掃描器和臉部辨識系統,在全自動駕駛中的應用也引人注目。與雷達和聲納不同,光學雷達提供高解析度 3D 資料,使其成為汽車、地質和農業等產業的重要工具。
所有的光學雷達系統由三個主要部分組成,包括一個發射光波的發射器,一個接收器來捕捉反射光波,以及一個處理器來解釋資料。在一秒的時間內,數千個脈動的光波撞擊物體、反彈,並提供準確的時序資料,以精準解釋環境中的內容及其動作。
光學雷達如何運作?
雷射發射
發射器以每秒 186,000 英里的速度,透過空氣傳送短脈衝雷射
光線偵測
當雷射脈衝撞擊物體時,一小部分光線會反射回接收器
資料處理
處理器會測量光線的行進時間、計算與物體的距離,並將資料轉換成詳細的 3D 地圖和模型
透過快速使用多個雷射發射器和脈衝光線 (每秒幾十萬次),光學雷達系統能夠從不同角度擷取寬廣視野中的測量值。結果是 3D 地圖,可提供有關位置、距離和移動的準確資訊。
光學雷達、雷達與聲納
在 20 世紀初期,雷達 (無線電偵測和測距) 和聲納 (聲音導航和測距) 用來測量距離,前者使用電磁無線電波,後者使用聲波。砰。然後,隨著在 1960 年代發明雷射,建立了一種利用光子學的全新距離感應系統。光學雷達使我們能夠以光速測量、繪製和解釋我們的世界。
距離感應系統如何比較?
| 雷達 | 聲納 | 光學雷達 |
感應方法 | 電磁無線電波 | 聲波 | 電磁光波 |
常見應用 | 空中交通管制、天氣預報 | 海洋導航、水下測繪、考古 | 自動駕駛車輛、地面測繪、機器人學 |
優點 |
|
|
|
缺點 |
|
|
|
光學雷達的用途是什麼?
透過空氣噴射雷射的想法可能看起來很科幻,但光學雷達是目前在各種產業和應用中使用的常見技術,包括:
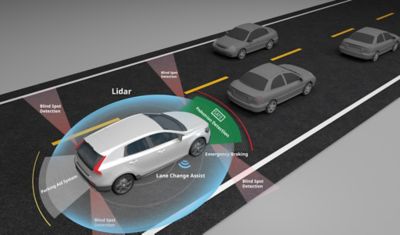
自動駕駛
與攝影機和雷達感應器一起運作,光學雷達可提供自駕車輛安全導航的重要資料。建立車輛周圍區域的 3D 地圖,光學雷達收集關於物體形狀、大小和位置的準確資訊,進而偵測道路標誌、其他車輛,障礙物和行人。光學雷達在遠處的準確度也讓自動駕駛車輛能夠追蹤車道,並協助防止碰撞。
電腦視覺
若要從影像和影片中取得有意義的資訊,和單一一個攝影機所提供的資訊比起來,電腦需要更多詳細資訊。將深度資訊與影像融合,光學雷達提供的資料讓電腦能夠辨識並解讀視覺世界。光學雷達輔助的電腦視覺通常用於擴增實境、手勢識別 (遊戲) 和醫療監控。
臉部辨識
在需要人臉辨識的系統驗證中,光學雷達可提高準確度並減少偽造。光學雷達高度精細的點雲包含面部結構中輪廓和尺寸的準確資料,有助於系統區分真實臉部和 2D 圖像。由於光學雷達使用自己的光源,因此它可以在低光照條件下,甚至是黑暗中投影表面。
機器人學
與自動駕駛車輛類似,機器人依賴光學雷達來幫助他們安全地行進於周圍環境。光學雷達的詳細 3D 地圖可提供機器人所需的準確資料,讓機器人在繁忙和多變的環境 (例如倉庫和工廠) 中,就其路線做出瞬間的明智、決策。這也有助於增強在製造、農業、搜尋和救援等複雜情況下工作的機器人的物體識別和操控能力。
我們許多人是在自動駕駛相關資訊中,第一次聽說光學雷達。在這裡,第 5 級自主性 (每種情境中的類人表現) 是最終目標。要實現這一目標,需要一系列感應器類型的協同努力,包括攝影機、雷達、超聲波和光學雷達。但正是因為光學雷達的準確度和範圍,例如,可以清楚地看到距離 200 公尺遠的物體,才使其被廣泛認為是避免碰撞和障礙物的關鍵。
光學雷達的類型
有幾種類型的光學雷達只能在自動駕駛中使用,包括掃描式、旋轉式和閃光式。此外,雖然大多數目前的光學雷達系統都使用飛行時間 (ToF) 偵測技術,但許多新一代系統都希望利用調頻連續波 (FMCW) 偵測。
製造商可以使用單一類型,或同時使用所有類型。除了車輛之外,光學雷達類型的選擇也不斷增加,有多種選項可支援範圍、機動性和環境方面的特定需求。
以下是描述光學雷達系統的一些常用術語的定義:
- 旋轉式光學雷達:旋轉光源以從整個場景擷取影像。旋轉是機械驅動的 (即自動駕駛車輛頂部通常會看到的旋轉頂部)。
- 掃描式光學雷達:這涉及使用進階技術 (例如相位陣列、繞射光學和超穎介面),而不是使用機械旋轉從全場景擷取影像。這通常也稱為「固態」光學雷達。
- 閃光式光學雷達:這涉及使用光源陣列,以單一「照射」擷取整個場景的影像 (與相機上的閃光燈很相似)。雖然這項技術比旋轉式光學雷達更堅固,但通常只能在較短的範圍內運作。
- ToF 偵測:這種光學雷達偵測方法依賴使用飛行時間 (即光源發射到接收器偵測到之間的時間) 來判斷與偵測到的物體的距離。
- FMCW 偵測:這種光學雷達偵測方法依賴以稍微不同的頻率將多個光束傳送到場景中,並測量它們之間的干擾,以確定與物體的距離。這種方法比 ToF 偵測更堅固,因為其他同時運作的光學雷達系統 (例如在其他車輛上) 可能會干擾資料擷取,但會需要更多的運算處理。
- 空載光學雷達:這指的是使用飛機、直升機和無人機等空中運載工具操作的光學雷達系統。
- 地面光學雷達:這指的是在卡車等地面運載工具上操作的光學雷達系統。
光學雷達有哪些優點和挑戰?
在速度和準確度主導優先順序的應用中,光學雷達是首選技術。但只要光學雷達仍然是最昂貴的感應方法,那麼它在普及過程中就可能繼續遇到阻力。
光學雷達的優點 | 光學雷達的挑戰 |
無與倫比的準確度 | 昂貴 |
光學雷達的未來
隨著所有技術對速度和準確度的需求持續不斷,光學雷達在整個系統中的整合也會增加。利用光學雷達實現的創新,將塑造醫療保健、運輸和農業等世界改變性產業的未來。
工程師和製造商利用模擬的預測洞察力,達到更高的光學雷達功能。使用光學和光子學軟體 (如 Ansys Speos、Lumerical、Zemax 和 AVxcelerate),設計者可以探索多種情境,以準確預測光學雷達的執行方式。透過模擬、測試和驗證,將光動力的想法更快地向前推進。
要留意的光學雷達趨勢:
- 智慧城市規劃
- 無人駕駛飛行器 (UAV)
- 環境研究與保護
- 穿戴式整合
無論是尋找穿過街道的行人,還是城市中侵蝕的坑洞,光學雷達都能以驚人的準確度和速度看到我們周圍的情況。透過在各種技術中運用光學雷達的力量,我們可以期待未來的許多重大發展。
相關資源
讓我們開始吧
如果您面臨工程挑戰,我們的團隊將隨時為您提供協助。憑藉豐富的經驗和對創新的承諾,我們邀請您與我們聯絡。讓我們共同合作,將您的工程障礙轉化為成長和成功的機會。立即與我們聯絡,開始對話。