Synopsys and Ansys power the future of innovation—connecting silicon to systems.
什麼是多體動力學?
大多數的機器都包含多種零件。機器人、工業設備、汽車懸吊和醫療裝置等產品,是從接頭連接並由馬達和致動器移動的結構開始打造。多體動力學 (MBD) 是數值模擬的子集,可為由互連零件組成的機械系統的動態行為建模,並考慮動量、接觸和加速度。
工程師將多體動力學模擬整合至產品開發和產品生命週期管理流程,原因是多體系統非常複雜,且系統中的元件以複雜的方式互動。舉例而言,為了決定工業機器的馬達尺寸,工程師需要知道必須用多少扭矩克服變速箱損耗、接頭處的摩擦、作用在零件上的外力,以及元件的動量。
相較於有限元素分析 (FEA) 模型等完整的高傳真度呈現,MBD 模型也更有效率,幾乎可以即時求解。特定產業中使用的機制通常相似,因此許多 MBD 軟體套件也包含特定應用領域的工具,以加速模型建構,並協助使用者在設計過程的早期階段,取得準確、可付諸行動的產品資訊。
與多體動力學模擬相關的重要定義
在研究 MBD 模擬的特定應用領域和使用建議之前,最好先瞭解多體動力學中的一些基本定義,從運動控制方程式、物理特性和 MBD 模型內容開始。
運動方程式
MBD 模型是牛頓運動方程式的數學表示法,F = ma (力 = 質量*加速度),轉換為暫態動態形式,以考慮系統中每個實體的行為:
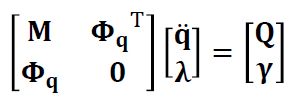
M = 系統質量矩陣。
q = 系統的廣義座標或位置。
\( \Phi_{q} \)= 將系統的約束與系統的廣義座標建立關聯的約束 Jacobian 矩陣。
\( \Phi_{\tau}^{q} \) = 約束 Jacobian 矩陣的轉置。
未知向量 (求解器計算的值):
q̈ = 系統中實體的廣義加速度。
\( \lambda \) = 拉格朗日(Lagrange)乘數,作為表示約束力的向量。這些是實體間連接上的未知力和扭矩。
力和約束向量 (右側向量):
Q = 廣義作用力,包括重力、彈簧和阻尼器力、致動器和馬達力,以及科氏力和離心力。
\( \Upsilon \)= 加速度約束,包括速度和固定位置。
多體動力學模擬的產業應用領域
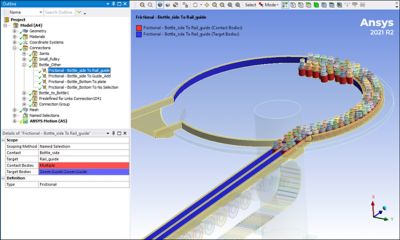
在 Ansys Motion 多體動力學模擬軟體中建模的瓶罐分類系統範例。
汽車懸吊
汽車中充滿了各種受益於 MBD 模擬的機構。事實上,汽車工程師是率先使用多體模擬方法的工程師之一。汽車懸吊具有包含彈簧和阻尼器的複雜聯動裝置,設計來吸收和緩和在崎嶇道路上行駛時的動態負載,是多體動力學的理想應用。這類模擬已成為汽車噪音、振動與聲振粗糙度 (NVH) 研究的必要部分,為駕駛與乘客提供舒適愉快的體驗。
太空船
MBD 模擬是航太工程師設計太空船的關鍵工具,因為在地球上,他們無法在零重力下輕鬆測試此類系統的移動和負載。一些常見的範例包括調整火箭馬達推力方向的雲台、太陽能板的部署機制,以及液態引擎或冷卻系統中使用的馬達和閥門。
機器人學
機器人可能是多體動力學系統最直接的真實呈現。它們由剛體組成,而這些剛體由接頭連接,並由馬達和線性致動器驅動。許多機器人程式設計系統都內建 MBD 求解器,可將精準模擬納入程式設計工作流程中。與工業機械一樣,多體動力學模擬的目標是偵測可能的碰撞、計算負載、判斷疲勞壽命,以及最佳化速度。
使用 Ansys Motion 多體動力學模擬軟體所建立的機器人模型動畫。
生物力學
我們自己的身體也是動態多體系統的絕佳範例。我們的肌肉作為致動器,可拉動在關節周圍移動骨骼的肌腱,並可進行一維 (關節)、二維 (手腕) 或三維 (髖關節) 旋轉。生物醫學工程師使用 MBD 模擬來讓運動員取得最佳表現,最佳化人工關節設計和醫療裝置設計,以進行物理治療,或固定身體的一部分,以協助從斷裂和扭傷中康復。
多體動力學模擬物理特性
這裡是一份常用來描述多體動力學模型物理特性術語的清單:。
- 自由度:點在模型中的位置和方向。3D 空間中的剛體具有六種自由度:沿三個軸 (x、y、z) 進行的三種平移,以及圍繞三個軸 (rotx、roty、rotz) 進行的三種旋轉。
- 運動學:線性和旋轉運動的說明,不考慮力,因而不考慮質量和動量。
- 動力學:隨時間變化的運動的說明,考慮力,因而考慮質量和動量。
- 質量:物體對線性加速度的阻力。
- 慣性矩:物體對角度加速度的阻力。
- 質心:物體中質量的平均位置。它代表所有質量集中的單一點。
- 質量屬性:實體的質量、慣性矩和質心。
- 動態力:作用於系統中物體的外部和內部力。動態力的範例包括重力、彈簧、阻尼器、致動器、馬達、摩擦,以及科氏力和離心力。在某些情況下,如使用阻尼或彈簧時,力可能取決於物體的位置或速度。
- 約束:自由度的位置、速度或加速度的定義值。
- 約束方程式:與兩個或多個自由度的位置、速度或加速度相關的公式。
多體動力學模擬建模術語
工程師使用以下術語,來描述其 MBD 模型的不同部分。
- 剛體:一種理想化的物體,在施加負載時不會變形。觀察剛體的數學方法是,任何兩點之間的距離永遠不會改變。
- 彈性體:施加負載時會變形的物體。MBD 工具使用多種不同的演算法,以簡化或詳細的方式呈現這種彈性。
- 連接:兩個物體之間的關係,定義了模型中實體間的相對運動 (接頭) 或力 (控制裝置)。
- 接頭:兩個物體之間的連接,指定自由度之間的約束。例如,旋轉接頭允許繞單一軸旋轉,但沒有相對平移,也沒有繞另一軸旋轉。
- 控制裝置:演算法,定義了兩個實體之間,或一個實體與地面之間的力。控制裝置可以是馬達、致動器、阻尼器、齒輪或彈簧。
- 邊界條件:以位置、速度或加速度形式定義的運動。
- 節點:模型中的一個點,求解器會在該處計算連接、力、位移和旋轉的方程式和求解。
- 負載:作用在物體上的內部或外部力或扭矩。
- 接觸:兩個實體接觸時的相互作用,以及在兩者之間轉移的接觸力。在動力學分析中,接觸規格可防止一個實體穿透另一個實體。
- 感測器:模型中的模擬裝置,用於測量和報告模型中的物理特性。範例包括兩個節點之間的距離、接頭處的反作用力和扭矩,以及實體的線性和旋轉位置、速度和加速度。在模擬過程中,感測器也會用於計算值,而控制裝置將使用這個值來計算負載。
使用多體動力學模擬進行駕駛設計的建議
在設計流程中,任何包含機構的系統都可以受益於多體動力學模擬。這可以是一項簡單的運動學研究,用來確保一切都能正確移動,也可以是複雜的非線性動力學模擬,用到接觸、非線性彈簧和複雜的步進馬達控制軟體。
為成功進行 MBD 建模,首要建議是選擇強大、準確且快速的通用 MBD 工具,例如 Ansys Motion 多體動力學模擬軟體。選擇易於使用、與 CAD 整合並提供進階功能的工具,不會限制產品模擬能力。
花時間規劃模型也很重要。以下步驟是良好的開始,為了建立有價值且穩健的 MBD 模擬,記錄所需內容:
- 決定 MBD 模型的目標
- 繪製組件圖
- 識別剛體和彈性體
- 確定彈性體應使用什麼表示方法
- 定義接頭和控制裝置
- 放置感應器,以在求解期間和求解後擷取資訊
同時,確認所選用的 MBD 模擬軟體是否具備特定應用領域的工作流程也是絕對必要的,因為這樣能夠讓模型的建立與後處理變得更加容易且高效。舉例來說,Ansys Motion 軟體包含傳動系統工具組、車輛系統工具組和鍊接工具組等應用領域,用於為鍊條、皮帶和履帶建模。
MBD 模型也可以在 Ansys Model Center 基於模型的系統工程軟體等工具中,支援系統層級模擬,方法是將其連接至 MATLAB/SIMULINK 控制模型,或在 Ansys TwinAI 數位孿生軟體中建立降階模型。
相關資源
讓我們開始吧
如果您面臨工程挑戰,我們的團隊將隨時為您提供協助。憑藉豐富的經驗和對創新的承諾,我們邀請您與我們聯絡。讓我們共同合作,將您的工程障礙轉化為成長和成功的機會。立即與我們聯絡,開始對話。