ANSYS BLOG
August 22, 2018
Small-Sliding Contacts Can Improve your Structural Analysis
I’m often asked, “What is the best contact type for my structural analysis?”
I can’t answer this for every model in existence. However, I can say that Ansys Mechanical made small-sliding contact the default contact type in small-deflection models or any bonded contact pairs.
Small-sliding contact can solve problems that finite-sliding contact may have difficulty solving. It also maintains sufficient accuracy while boasting a lower computational cost.
The speed and accuracy of small-sliding contacts will make it a preferred choice compared to finite-sliding contacts.
Ansys has performed extensive tests using small-sliding contacts to represent bonded contact pairs in small deflection models. It was found to be an accurate and computationally light option — if your simulation has an absence of large sliding.
How Small-Sliding Contacts Work within Your Structural Analysis
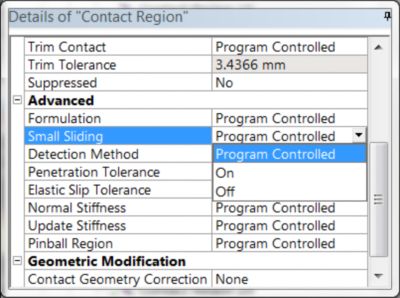
The small-sliding contact assumes the contact interface between two parts will experience minimal motion during the entire analysis. To be exact, the contact defines “small sliding” as movement that is less than twenty percent of the contact length. For large deflection analysis, this option still permits an arbitrary large rotation.
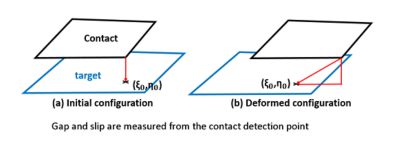
Representation of the small sliding contact
Each contact detection point (ξ0, η0) interacts with the same target element throughout the course of the analysis (as illustrated above). These interactions are determined from the initial conditions.
Advantages to Using a Small-Sliding Contact in Your Structural Analysis
Ansys found that the small-sliding contact improves the solution’s robustness and efficiency.
For one thing, the small-sliding contact doesn’t appear to slip off the edge of a target segment. It also doesn’t encounter penetration shock.
Additionally, the logic behind the small sliding contact can solve complex contact models that the finite-sliding logic has difficulty with. This is especially true in models that have a low-quality geometry, mesh and non-smooth contact interfaces.
Another advantage is that the nodal connectivity of the contact element is formed only once at the beginning of the analysis.
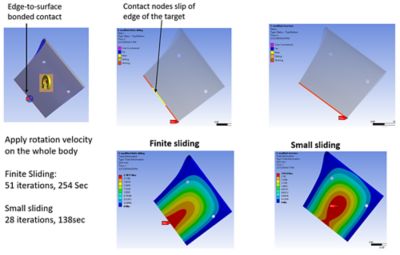
Small-sliding contacts do not appear to slip off the edge of a target
segment and do not encounter penetration shock.
The value then remains unchanged for each iteration of the solution. In comparison, the Ansys 18.2 version of the finite-sliding contact reformed the nodal connectivity of the contact element at each iteration. Not having to perform this calculation at each iteration will certainly save on your computational costs.
Similarly, the sparse solver can also reuse the same matrix structure throughout the simulation. This avoids a costly sequential step that orders equations at every iteration. Like the nodal connectivity, ditching this step leads to significant performance improvements and better scalability.
Choosing Between Finite-Sliding and Small-Sliding Contacts for Your Structural Analysis
In general, small-sliding contacts achieve results that are very similar to those of finite-sliding. However, this presumes that the small-sliding assumption remains valid.
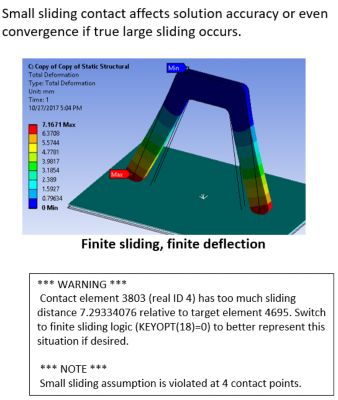
The logic behind the small-sliding contact can cause nonphysical results if the relative sliding motion does not remain small. If large sliding occurs, result accuracy is affected. Your simulation may even experience convergence difficulties if there is too much sliding.
As a result, you will need to ensure that the small-sliding assumption is valid throughout the analysis. This can be done by tracking the contact results and outputs. The Ansys platform can also monitor sliding violations as the solver iterates.
In the event that the small-sliding contact isn’t valid to your simulation, it is recommended that you use the finite-sliding contact instead.
Small-sliding contact will improve many simulations,but it isn’t always valid.Check your results to see if another contact type is a better option.
None the less, small-sliding contacts typically offer improved solution robustness, efficiency and speed when compared to finite-sliding contacts. Therefore, if it is valid to your solution, slide it into your model.
Learn more about the small-sliding contact in Ansys Mechanical.