Synopsys and Ansys power the future of innovation—connecting silicon to systems.
-
-
Accédez au logiciel étudiant gratuit
Ansys donne les moyens à la prochaine génération d'ingénieurs
Les étudiants ont accès gratuitement à un logiciel de simulation de classe mondiale.
-
Connectez-vous avec Ansys maintenant !
Concevez votre avenir
Connectez-vous à Ansys pour découvrir comment la simulation peut alimenter votre prochaine percée.
Espace client
Support
Communautés partenaires
Contacter le service commercial
Pour les États-Unis et le Canada
S'inscrire
Essais gratuits
Produits & Services
Apprendre
À propos d'Ansys
Back
Produits & Services
Back
Apprendre
Ansys donne les moyens à la prochaine génération d'ingénieurs
Les étudiants ont accès gratuitement à un logiciel de simulation de classe mondiale.
Back
À propos d'Ansys
Concevez votre avenir
Connectez-vous à Ansys pour découvrir comment la simulation peut alimenter votre prochaine percée.
Espace client
Support
Communautés partenaires
Contacter le service commercial
Pour les États-Unis et le Canada
S'inscrire
Essais gratuits
INFORMATIONS SUR LE SUJET
Qu'est-ce que la dynamique multi-corps ?
La plupart des machines contiennent plusieurs pièces. Des produits comme les robots, les équipements industriels, les suspensions automobiles et les dispositifs médicaux sont construits à partir de structures reliées par des articulations et déplacées par des moteurs et des actionneurs. La dynamique multi-corps (MBD) est un domaine de la simulation numérique qui modélise le comportement dynamique de systèmes mécaniques composés de pièces interconnectées, en tenant compte de la quantité de mouvement, du contact et de l'accélération.
Les ingénieurs intègrent la simulation dynamique multi-corps dans leurs processus de développement et de gestion du cycle de vie des produits, car les systèmes à corps multiples sont complexes et les composants du système interagissent de manière complexe. Par exemple, pour dimensionner un moteur destiné à une machine industrielle, les ingénieurs doivent connaître la quantité de couple nécessaire pour surmonter les pertes de boîte de vitesses, le frottement au niveau des articulations, les forces externes agissant sur les pièces et la quantité de mouvement des composants.
Un modèle MBD est également beaucoup plus efficace qu'une représentation complète et haute fidélité telle qu'un modèle d'analyse par éléments finis (FEA), puisqu'il permet d'obtenir des résultats en temps quasi réel. Dans un secteur donné, les mécanismes utilisés sont souvent similaires, de nombreux progiciels MBD incluent également des outils propres aux applications pour accélérer la construction de modèles et aider les utilisateurs à obtenir des informations précises et exploitables sur leurs produits plus tôt dans le processus de conception.
Définitions importantes relatives à la simulation dynamique multi-corps
Avant d'examiner les applications spécifiques et les recommandations d'utilisation de la simulation MBD, il est judicieux de comprendre certaines notions fondamentales de la dynamique multi-corps, en commençant par l'équation de mouvement, les caractéristiques physiques et les éléments constitutifs d'un modèle MBD.
Équation de mouvement
Un modèle MBD est une représentation mathématique des équations de mouvement de Newton, F = ma (force = masse*accélération), converties en une forme dynamique transitoire afin de prendre en compte le comportement de chaque corps dans un système :
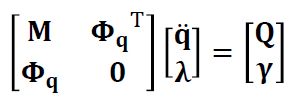
M = la matrice de masse du système.
q = les coordonnées généralisées ou les emplacements du système.
\( \Phi_{q} \) = la matrice jacobienne des contraintes qui relie les contraintes du système aux coordonnées généralisées du système.
\( \Phi_{\tau}^{q} \) = la transposition de la matrice jacobienne des contraintes.
Le vecteur des inconnues (les valeurs calculées par le solveur) :
q̈ = les accélérations généralisées des corps dans le système.
\( \lambda \) = les multiplicateurs de Lagrange sous la forme d'un vecteur représentant les forces de contrainte. Il s'agit des forces et des couples inconnus agissant sur les connexions entre les corps.
Vecteur de force et de contrainte (vecteur de droite) :
Q = les forces généralisées appliquées, y compris les forces de gravité, des ressorts et des amortisseurs, les forces des actionneurs et des moteurs, ainsi que les forces de Coriolis et centrifuges.
\( \Upsilon \) = les contraintes d'accélération, y compris les vitesses et les positions fixes.
Applications industrielles pour la simulation dynamique multi-corps
De nombreux secteurs fabriquent des produits qui sont des systèmes multi-corps, dotés de composants qui se déplacent les uns par rapport aux autres et transmettent des forces entre les corps. Vous trouverez ci-dessous cinq exemples concrets dans lesquels les ingénieurs mécaniques utilisent la simulation MBD pour comprendre la dynamique du système des produits qu'ils conçoivent et entretiennent.
Machines industrielles
Les mécanismes complexes pilotent de nombreuses machines de fabrication et de traitement des matériaux, de sorte que les ingénieurs en mécanique qui les conçoivent s'appuient sur la simulation dynamique multi-corps. Les ingénieurs utilisent des modèles MBD pour prototyper virtuellement les fonctionnalités. Ils utilisent leur modèle pour s'assurer que les pièces n'entrent pas en contact de manière indésirable, dimensionnent les moteurs et les actionneurs, et calculent les charges cycliques sur les composants pour estimer la fatigue. Ils utilisent également leurs modèles pour optimiser l'efficacité du système, en ajustant les paramètres d'entrée et la géométrie afin d'augmenter le débit. Les ingénieurs peuvent également connecter leur logiciel de contrôle à leur modèle MBD pour effectuer des tests virtuels de l'ensemble du système.
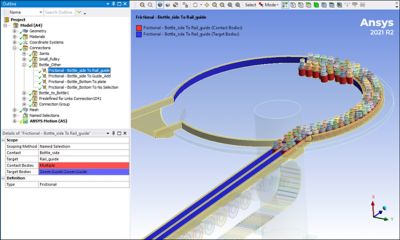
Exemple de système de tri de bouteilles modélisé dans le logiciel de simulation dynamique multi-corps Ansys Motion.
Suspensions automobiles
Les voitures regorgent de mécanismes qui tirent parti des simulations MBD. En réalité, les ingénieurs automobiles ont été parmi les premiers à utiliser l'approche de simulation multi-corps. Les suspensions automobiles, avec leurs articulations complexes comprenant des ressorts et des amortisseurs conçus pour absorber et atténuer les charges dynamiques liées à la conduite sur des routes accidentées, constituent un cas d'application idéal pour la dynamique multi-corps. Ce type de simulation est devenu un élément essentiel des études sur le bruit, les vibrations et les secousses (NVH) dans le secteur automobile afin d'offrir une expérience agréable aux conducteurs et aux passagers.
Engin spatial
La simulation MBD est un outil essentiel pour les ingénieurs aérospatiaux qui conçoivent des engins spatiaux, car ils ne peuvent pas facilement tester le mouvement et les charges de ces systèmes en apesanteur sur Terre. Quelques exemples courants incluent le cardan qui ajuste la direction de poussée d'un moteur de fusée, le mécanisme de déploiement d'un panneau solaire, ainsi que les moteurs et soupapes utilisés dans les moteurs à liquide ou les systèmes de refroidissement.
Robotique
Les robots sont probablement la représentation réelle la plus directe des systèmes dynamiques multi-corps. Ils sont constitués de corps rigides reliés par des articulations et entraînés par des moteurs et des actionneurs linéaires. De nombreux systèmes de programmation robotique comportent des solveurs MBD afin d'intégrer une simulation précise au processus de programmation. Comme pour les machines industrielles, l'objectif de la simulation dynamique multi-corps est de détecter les collisions possibles, de calculer les charges, de déterminer la durée de vie en contrainte et d'optimiser la vitesse.
Animation d'un robot modélisé dans le logiciel de simulation dynamique multi-corps Ansys Motion.
Biomécanique
Nos propres corps sont également de grandes représentations de systèmes multi-corps dynamiques. Nos muscles agissent comme des actionneurs qui tirent sur les tendons, ce qui permet de déplacer les os autour des articulations et d'effectuer des rotations autour d'un axe (articulation), de deux axes (poignet) ou de trois axes (hanche). Les ingénieurs biomédicaux utilisent des simulations MBD pour optimiser la performance d'un athlète, la conception d'articulations artificielles et la conception de dispositifs médicaux pour la physiothérapie ou pour maintenir des parties du corps rigides afin de faciliter la récupération après des ruptures et des entorses.
Caractéristiques physiques de la simulation dynamique multi-corps
Voici une liste des termes les plus couramment utilisés pour décrire les caractéristiques physiques des modèles dynamiques multi-corps.
- Degré de liberté : position et orientation d'un point dans le modèle. Un corps rigide dans un espace 3D possède six degrés de liberté : les trois translations le long des trois axes (x, y, z) et les trois rotations autour des trois axes (rotx, roty, rotz).
- Cinématique : description du mouvement linéaire et rotationnel sans tenir compte des forces, et donc de la masse et du moment.
- Dynamique : description du mouvement dans le temps, en tenant compte des forces et donc de la masse et du mouvement.
- Masse : résistance d'un objet à l'accélération linéaire.
- Moments d'inertie : résistance d'un objet à l'accélération angulaire.
- Centre de masse : position moyenne de la masse dans un objet. Il représente un point unique où toute la masse se concentre.
- Propriétés de masse : masse, moments d'inertie et centre de masse d'un corps.
- Forces dynamiques : forces externes et internes appliquées agissant sur les objets du système. Parmi les exemples de forces dynamiques, on peut citer la gravité, les ressorts, les amortisseurs, les actionneurs, les moteurs et le frottement, ainsi que les forces de Coriolis et centrifuges. Dans certains cas, comme dans le cas d'un amortissement ou d'un ressort, la force peut dépendre de la position ou de la vitesse de l'objet.
- Contrainte : valeur définie pour la position, la vitesse ou l'accélération d'un degré de liberté.
- Équations de contraintes : formulation mettant en relation la position, la vitesse ou l'accélération de deux degrés de liberté ou plus.
Termes relatifs à la modélisation de la simulation dynamique multi-corps
Les ingénieurs utilisent les termes suivants pour décrire différentes parties de leurs modèles MBD.
- Corps rigide : objet idéalisé qui ne se déforme pas lorsqu'un chargement est appliqué. D'un point de vue mathématique, un corps rigide se caractérise par le fait que la distance entre deux points ne change jamais.
- Corps flexible : objet qui se déforme lorsqu'un chargement est appliqué. Les outils MBD utilisent plusieurs algorithmes différents pour représenter cette flexibilité de manière simplifiée ou détaillée.
- Connexions : relation entre deux objets définissant le mouvement relatif (liaisons) ou les forces (dispositifs de contrôle) entre les corps du modèle.
- Articulations : connexion entre deux objets qui spécifie des contraintes entre les degrés de liberté. Par exemple, un pivot permet la rotation autour d'un seul axe, mais pas la translation relative ni la rotation autour de l'autre axe.
- Appareils de contrôle : algorithme qui définit une force entre deux corps ou un corps et le sol. Un appareil de contrôle peut être un moteur, un actionneur, un amortisseur, des engrenages ou un ressort.
- Conditions aux limites : mouvement défini sous la forme d'une position, d'une vitesse ou d'une accélération.
- Nœuds : point du modèle où le solveur calcule les équations et les solutions pour les connexions, les forces, les déplacements et les rotations.
- Charges : force ou couple interne ou externe agissant sur un objet.
- Contact : interaction entre deux corps lorsqu'ils se touchent, et transfert de forces de contact entre eux. Dans une analyse dynamique, une spécification de contact empêche un corps de pénétrer dans un autre.
- Capteurs : dispositif simulé dans le modèle qui mesure et rapporte une caractéristique physique dans le modèle. Les exemples incluent la distance entre deux nœuds, les forces de réaction et les couples au niveau d'une articulation, ainsi que les positions linéaires et rotatives, les vitesses et les accélérations d'un corps. Les capteurs sont également utilisés pendant une simulation pour calculer les valeurs utilisées par les appareils de contrôle afin de calculer les charges.
Suggestions pour l'optimisation des conceptions à l'aide de la simulation dynamique multi-corps
Tout système contenant des mécanismes peut bénéficier de la simulation dynamique multi-corps pendant le processus de conception. Il peut s'agir d'une simple étude cinématique visant à s'assurer que tout se déplace correctement, ou d'une simulation dynamique non linéaire complexe avec contact, ressorts non linéaires et logiciel de commande de moteur pas-à-pas sophistiqué.
La recommandation la plus importante pour mener à bien la modélisation MBD est de choisir un outil MBD robuste, précis et rapide à usage général comme le logiciel de simulation dynamique multicorps Ansys Motion. Choisir un outil facile à utiliser, qui s'intègre à la CAO et qui offre des fonctionnalités avancées ne limitera pas les capacités de simulation de produit.
Il est également important de prendre le temps de planifier le modèle. Les étapes suivantes permettent de bien documenter ce qui est nécessaire pour créer une simulation MBD robuste et efficace :
- Définir l'objectif du modèle MBD
- Cartographier l'assemblage
- Identifier les corps rigides et flexibles
- Déterminer quelles méthodes les corps flexibles doivent représenter
- Définir les articulations et les appareils de contrôle
- Placer des capteurs pour recueillir des informations pendant et après les calculs
Il est également utile de vérifier si le logiciel de simulation MBD sélectionné dispose de processus propres à l'application qui rendent la configuration et le post-traitement des modèles beaucoup plus faciles. À titre d'exemple, le logiciel Ansys Motion comprend des applications telles que Drivetrain Toolkit, Car Toolkit et Links Toolkit pour la modélisation de chaînes, de courroies et de chenilles.
Les modèles MBD peuvent également prendre en charge la simulation au niveau du système dans un outil tel que le logiciel d'ingénierie des systèmes basée sur des modèles Ansys Model Center, en le connectant au modèle de contrôle MATLAB/SIMULINK ou en créant des modèles d'ordre réduit dans le logiciel de jumeaux numériques Ansys TwinAI.
Ressources connexes
Commençons
Si vous êtes confronté à des défis d'ingénierie, notre équipe est là pour vous aider. Forts de notre expérience et de notre engagement en faveur de l'innovation, nous vous invitons à nous contacter. Collaborons pour transformer vos obstacles techniques en opportunités de croissance et de réussite. Contactez-nous dès aujourd'hui pour entamer la conversation.