Synopsys and Ansys power the future of innovation—connecting silicon to systems.
-
-
Software gratuito per studenti
Ansys potenzia la nuova generazione di ingegneri
Gli studenti hanno accesso gratuito a software di simulazione di livello mondiale.
-
Connettiti subito con Ansys!
Progetta il tuo futuro
Connettiti a Ansys per scoprire come la simulazione può potenziare la tua prossima innovazione.
Customer Center
Supporto
Partner Community
Contatta l'ufficio vendite
Per Stati Uniti e Canada
Accedi
Prove Gratuite
Prodotti & Servizi
Scopri
Chi Siamo
Back
Prodotti & Servizi
Back
Scopri
Ansys potenzia la nuova generazione di ingegneri
Gli studenti hanno accesso gratuito a software di simulazione di livello mondiale.
Back
Chi Siamo
Progetta il tuo futuro
Connettiti a Ansys per scoprire come la simulazione può potenziare la tua prossima innovazione.
Customer Center
Supporto
Partner Community
Contatta l'ufficio vendite
Per Stati Uniti e Canada
Accedi
Prove Gratuite
DETTAGLI DELL'ARGOMENTO
Che cos'è la dinamica multicorpo?
La maggior parte delle macchine contiene più componenti. Prodotti come robot, attrezzature industriali, sospensioni automobilistiche e dispositivi medici sono costruiti da strutture collegate da giunti e movimentate da motori e attuatori. La dinamica multicorpo (MBD) è un sottoinsieme della simulazione numerica che modella il comportamento dinamico di sistemi meccanici composti da parti interconnesse, tenendo conto della quantità di moto, del contatto e dell'accelerazione.
Gli ingegneri integrano la simulazione della dinamica multicorpo nei loro processi di sviluppo prodotto e di gestione del ciclo di vita del prodotto (PLM) perché i sistemi multicorpo sono complessi e i componenti all'interno del sistema interagiscono in modi articolati. Ad esempio, per dimensionare un motore per una macchina industriale, gli ingegneri devono sapere quanta coppia è necessaria per vincere le perdite del riduttore, l'attrito nei giunti, le forze esterne che agiscono sulle parti e la quantità di moto dei componenti.
Un modello MBD è inoltre molto più efficiente, risolvendo le equazioni quasi in tempo reale rispetto a una rappresentazione completa ad alta fedeltà come un modello di analisi degli elementi finiti (FEA). All'interno di un determinato settore, i meccanismi utilizzati sono spesso simili, pertanto molti pacchetti software MBD includono anche strumenti specifici per l'applicazione per velocizzare la costruzione del modello e aiutare gli utenti a ottenere informazioni accurate e fruibili sui loro prodotti nelle prime fasi del processo di progettazione.
Definizioni importanti relative alla simulazione della dinamica multicorpo
Prima di esaminare le applicazioni specifiche e le raccomandazioni per l'uso della simulazione MBD, è opportuno comprendere alcune definizioni di base all'interno della dinamica multicorpo, a partire dall'equazione di governo del moto, dalle caratteristiche fisiche e dai contenuti di un modello MBD.
Equazione del moto
Un modello MBD è una rappresentazione matematica delle equazioni di moto di Newton, F = ma (forza = massa * accelerazione), convertite in una forma dinamica transitoria per tenere conto del comportamento di ogni corpo in un sistema:
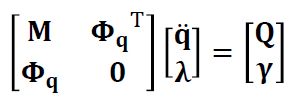
M = la matrice di massa del sistema.
q = le coordinate generalizzate, o posizioni del sistema.
\( \Phi_{q} \)= la matrice Jacobiana dei vincoli che relaziona i vincoli del sistema alle coordinate generalizzate del sistema.
\( \Phi_{\tau}^{q} \) = la trasposta della matrice Jacobiana dei vincoli.
Il vettore delle incognite (i valori calcolati dal solutore):
q̈ = le accelerazioni generalizzate dei corpi nel sistema.
\( \lambda \) = i moltiplicatori di Lagrange come vettore rappresentante le forze di vincolo. Queste sono le forze e le coppie incognite sulle connessioni tra i corpi.
Vettore delle forze e dei vincoli (vettore della mano destra):
Q = le forze generalizzate applicate, incluse gravità, forze di molle e smorzatori, forze di attuatori e motori, e forze di Coriolis e centrifughe.
\( \Upsilon \)= i vincoli di accelerazione, incluse velocità e posizioni fisse.
Applicazioni industriali per la simulazione dinamica multicorpo
Molte industrie realizzano prodotti che sono sistemi multicorpo, costituiti da componenti che si muovono l'uno rispetto all'altro e trasmettono forze tra i corpi. Di seguito sono riportati cinque esempi reali in cui gli ingegneri meccanici utilizzano la simulazione MBD per comprendere la dinamica dei sistemi dei prodotti che progettano e mantengono.
Macchinari industriali
Meccanismi complessi guidano molte macchine di produzione e di lavorazione dei materiali, pertanto gli ingegneri meccanici che le progettano si affidano alla simulazione della dinamica multicorpo. Gli ingegneri utilizzano i modelli MBD per prototipare virtualmente la funzionalità. Utilizzeranno il loro modello per assicurarsi che le parti non abbiano contatti indesiderati, per dimensionare motori e attuatori e per calcolare i carichi ciclici sui componenti per stimare la fatica. Utilizzano i loro modelli anche per ottimizzare l'efficienza del sistema, regolando i parametri di input e la geometria per aumentare la produttività (throughput). Gli ingegneri possono inoltre collegare il loro software di controllo al modello MBD per eseguire test virtuali dell'intero sistema.
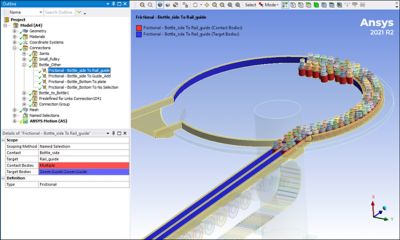
Un esempio di un sistema di smistamento bottiglie modellato nel software di simulazione della dinamica multicorpo Ansys Motion.
Sospensioni automobilistiche
Le automobili sono ricche di meccanismi che traggono vantaggio dalle simulazioni MBD. Infatti, gli ingegneri automobilistici sono stati tra i primi a utilizzare l'approccio della simulazione multicorpo. Le sospensioni automobilistiche, con i loro complessi leveraggi contenenti molle e ammortizzatori progettati per assorbire e smorzare i carichi dinamici derivanti dalla guida su strade sconnesse, sono ideali per la dinamica multicorpo. Questo tipo di simulazione è diventato una parte essenziale degli studi automobilistici su rumore, vibrazioni e ruvidità (NVH - Noise, Vibration, Harshness) per offrire un'esperienza piacevole ai conducenti e ai passeggeri.
Veicoli spaziali
La simulazione MBD è uno strumento fondamentale per gli ingegneri aerospaziali che progettano veicoli spaziali, poiché sulla Terra non è possibile testare facilmente il movimento e i carichi di tali sistemi in condizioni di zero gravità. Alcuni esempi comuni includono il gimbal (giunto cardanico) che regola la direzione della spinta di un motore a razzo, il meccanismo di dispiegamento di un pannello solare e i motori e le valvole utilizzati nei motori a propellente liquido o nei sistemi di raffreddamento.
Robotica
I robot sono forse la rappresentazione reale più diretta dei sistemi dinamici multicorpo. Sono costituiti dacorpi rigidi collegati da giunti e azionati da motori e attuatori lineari. Molti sistemi di programmazione robotica dispongono di MBD solver integratirendendo la simulazione accurata parte integrante del workflow di programmazione. Come per i macchinari industriali, l'obiettivo della simulazione della dinamica multicorpo è rilevare possibili collisioni, calcolare i carichi, determinare la vita a fatica e ottimizzare la velocità.
Un esempio di animazione di un robot modellato nel software di simulazione della dinamica multicorpo Ansys Motion.
Biomeccanica
Anche i nostri corpi sono ottimi esempi di sistemi multicorpo dinamici. I nostri muscoli agiscono come attuatori che tirano i tendini, i quali muovono le ossa attorno alle articolazioni e consentono la rotazione attorno a uno (nocca), due (polso) o tre assi (anca). Gli ingegneri biomedici utilizzano le simulazioni MBD per ottimizzare le prestazioni degli atleti, la progettazione di articolazioni artificiali e il design di dispositivi medici per la fisioterapia o per immobilizzare parti del corpo al fine di favorire il recupero da fratture e distorsioni.
Caratteristiche fisiche della simulazione dinamica multicorpo
Ecco un elenco dei termini più comunemente utilizzati per descrivere le caratteristiche fisiche dei modelli di dinamica multicorpo.
- Grado di libertà: la posizione e l'orientamento di un punto nel modello. Un corpo rigido nello spazio 3D ha sei gradi di libertà: le tre traslazioni lungo i tre assi (x, y, z) e le tre rotazioni intorno ai tre assi (rotx, roty, rotz).
- Cinematica: la descrizione del moto lineare e rotatorio senza tenere conto delle forze e, di conseguenza, della massa e della quantità di moto.
- Dinamica: la descrizione del moto nel tempo, tenendo conto delle forze, e quindi della massa e della quantità di moto.
- Massa: la resistenza di un oggetto all'accelerazione lineare.
- Momenti di inerzia: la resistenza di un oggetto all'accelerazione angolare.
- Centro di massa: la posizione media della massa in un oggetto. Rappresenta un singolo punto in cui si concentra tutta la massa.
- Proprietà di massa: la massa, i momenti d'inerzia e il centro di massa di un corpo.
- Forze dinamiche: Le forze applicate, esterne e interne, che agiscono sugli oggetti nel sistema. Esempi di forze dinamiche includono la gravità, le molle, gli smorzatori, gli attuatori, i motori e l'attrito, così come le forze di Coriolis e centrifughe. In alcuni casi, come con lo smorzamento o una molla, la forza può dipendere dalla posizione o dalla velocità dell'oggetto.
- Vincolo: un valore definito per la posizione, la velocità o l'accelerazione di un grado di libertà.
- Equazioni di vincolo: una formulazione che relaziona la posizione, la velocità o l'accelerazione di due o più gradi di libertà.
Termini di modellazione della simulazione della dinamica multicorpo
Gli ingegneri utilizzano i seguenti termini per descrivere le diverse parti dei loro modelli MBD.
- Corpo rigido: un oggetto idealizzato che non si deforma quando viene applicato un carico. Un modo matematico di considerare un corpo rigido è che la distanza tra due punti qualsiasi non cambia mai.
- Corpo flessibile: Un oggetto che si deforma quando viene applicato un carico. Gli strumenti MBD utilizzano diversi algoritmi per rappresentare questa flessibilità in modo semplificato o dettagliato.
- Connessioni: una relazione tra due oggetti che definisce il moto relativo (giunti) o le forze (dispositivi di controllo) tra i corpi nel modello.
- Giunti: una connessione tra due oggetti che specifica i vincoli tra i gradi di libertà. Ad esempio, un giunto rotoidale (revolute joint) consente la rotazione attorno a un singolo asse, ma nessuna traslazione relativa e nessuna rotazione attorno agli altri assi.
- Dispositivi di controllo: un algoritmo che definisce una forza tra due corpi o tra un corpo e il terreno. Un dispositivo di controllo può essere un motore, un attuatore, uno smorzatore, degli ingranaggi o una molla.
- Condizioni al contorno: un moto definito sotto forma di posizione, velocità o accelerazione.
- Nodi: un punto nel modello in cui il solver calcola le equazioni e le soluzioni per connessioni, forze, spostamenti e rotazioni.
- Carichi: una forza o coppia interna o esterna che agisce su un oggetto.
- Contatto: L'interazione di due corpi quando si toccano e le forze di contatto si trasmettono tra loro. In un'analisi dinamica, una specifica di contatto impedisce a un corpo di penetrare in un altro.
- Sensori: un dispositivo simulato nel modello che misura e riporta una caratteristica fisica nel modello. Gli esempi includono la distanza tra due nodi, le forze di reazione e le coppie in un giunto, e le posizioni, velocità e accelerazioni lineari e rotazionali di un corpo. I sensori vengono utilizzati durante una simulazione anche per computare i valori impiegati dai dispositivi di controllo per calcolare i carichi.
Suggerimenti per guidare la progettazione con la simulazione della dinamica multicorpo
Qualsiasi sistema contenente meccanismi può trarre vantaggio dalla simulazione della dinamica multicorpo durante il processo di progettazione. Può trattarsi di un semplice studio cinematico per assicurarsi che tutto si muova correttamente, o di una complessa simulazione dinamica non lineare con contatti, molle non lineari e software di controllo per motori passo-passo complessi.
La raccomandazione più importante per il successo nella modellazione MBD è la scelta di uno strumento MBD generico robusto, accurato e veloce, come il software di simulazione della dinamica multicorpo Ansys Motion. Selezionare uno strumento facile da usare, che si integri con il CAD e offra funzionalità avanzate, non porrà limiti alle capacità di simulazione del prodotto.
Anche dedicare del tempo alla pianificazione del modello è importante. I seguenti passaggi sono un buon punto di partenza per documentare ciò che è necessario per creare una simulazione MBD valida e robusta:
- Decidere qual è l'obiettivo del modello MBD
- Mappare l'insieme
- Individuare i corpi rigidi e flessibili
- Stabilire quali metodi debbano rappresentare i corpi flessibili.
- Definire i giunti e i dispositivi di controllo
- Posizionare i sensori per estrarre informazioni durante e dopo la fase di solving.
È inoltre opportuno verificare se il software di simulazione MBD selezionato disponga di flussi di lavoro specifici per l'applicazione che rendano molto più semplice l'impostazione e il post-processing dei modelli. Ad esempio, il software Ansys Motion include applicazioni come il Drivetrain Toolkit, il Car Toolkit e il Links Toolkit per la modellazione di catene, cinghie e cingoli.
I modelli MBD possono anche supportare la simulazione a livello di sistema in uno strumento come il software di ingegneria dei sistemi basata su modelli Ansys Model Center, collegandolo al modello di controllo MATLAB/SIMULINK o creando modelli di ordine ridotto nel software per gemelli digitali Ansys TwinAI.
Risorse correlate
Cominciamo
Se devi affrontare sfide di progettazione, il nostro team è a tua disposizione per assisterti. Con una vasta esperienza e un impegno per l'innovazione, ti invitiamo a contattarci. Collaboriamo per trasformare i tuoi ostacoli ingegneristici in opportunità di crescita e successo. Contattaci oggi stesso per iniziare la conversazione.