Synopsys and Ansys power the future of innovation—connecting silicon to systems.
-
-
Kostenlose Software für Studierende
Ansys unterstützt die nächste Generation von Ingenieur*innen
Studenten erhalten kostenlosen Zugang zu erstklassiger Simulationssoftware.
-
Verbinden Sie sich jetzt mit Ansys!
Gestalten Sie Ihre Zukunft
Stellen Sie eine Verbindung mit Ansys her, um zu erfahren, wie Simulation Ihren nächsten Durchbruch vorantreiben kann.
Kostenlose Demoversionen
Produkte & Dienstleistungen
Lernportal
Über das Unternehmen
Back
Produkte & Dienstleistungen
Back
Lernportal
Ansys unterstützt die nächste Generation von Ingenieur*innen
Studenten erhalten kostenlosen Zugang zu erstklassiger Simulationssoftware.
Back
Über das Unternehmen
Gestalten Sie Ihre Zukunft
Stellen Sie eine Verbindung mit Ansys her, um zu erfahren, wie Simulation Ihren nächsten Durchbruch vorantreiben kann.
Kostenlose Demoversionen
THEMENDETAILS
Was ist Multibody Dynamics?
Fast jede Maschine setzt sich aus mehreren Teilen zusammen. Produkte wie Roboter, Industriegeräte, Fahrzeugaufhängungen und medizinische Gerätewerden aus Bauteilen zusammengestellt, die durch Gelenke oder Verbindungen miteinander verbunden sind und von Motoren und Aktoren bewegt werden. Multibody Dynamics (MBD) ist eine Teilmenge der numerischen Simulation, die das dynamische Verhalten mechanischer Systeme modelliert, die aus miteinander verbundenen Teilen bestehen, und Impuls, Kontakt und Beschleunigung berücksichtigt.
Ingenieur*innen integrieren Mehrkörperdynamik-Simulationen in ihre Produktentwicklungs- und Produktlebenszyklusmanagementprozesse, da MBD-System komplex sind und die Komponenten im System auf komplexe Weise interagieren. Um beispielsweise einen Motor für eine Industriemaschine zu dimensionieren, müssen Ingenieur*innen wissen, wie viel Drehmoment erforderlich ist, um Getriebeverluste, Reibung an den Gelenken, äußere Kräfte auf die Teile und den Impuls der Bauteile zu überwinden.
Ein MBD-Modell ist zudem deutlich effizienter und erbringt Lösungen fast in Echtzeit, verglichen mit einer vollständigen, detailgetreuen Darstellung wie einem Modell der Finite-Elemente-Analyse (FEA). In einer vorgegebenen Branchen sind die verwendeten Mechanismen zumeist ähnlich. Viele MBD-Softwarepakete enthalten auch anwendungsspezifische Tools, um die Modellentwicklung zu beschleunigen und Anwendern zu helfen, frühzeitig im Konstruktionsprozess genaue, umsetzbare Informationen zu ihren Produkten zu erhalten.
Wichtige Definitionen im Zusammenhang mit MDB-Simulation
Bevor Sie sich mit spezifischen Anwendungen und Empfehlungen für die Verwendung von MBD-Simulationen befassen, sollten Sie einige grundlegende Definitionen innerhalb der Mehrkörperdynamik verstehen, beginnend mit der maßgeblichen Gleichung von Bewegung, physikalischen Eigenschaften und dem Inhalt eines MBD-Modells.
Bewegungsgleichung
Ein MBD-Modell ist eine mathematische Darstellung der Newtonschen Bewegungsgleichungen F = mA (Kraft = Masse*Beschleunigung), die in eine transiente dynamische Form umgewandelt wird, um das Verhalten jedes Körpers in einem System zu berücksichtigen:
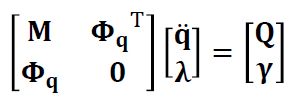
M = Systemmassenmatrix.
q = allgemeine Koordinaten oder Positionen des Systems.
\( \Phi_{q} \) = Zwangsbedingungs-Jacobi-Matrix, die die Zwangsbedingungen des Systems mit den allgemeinen Koordinaten des Systems in Beziehung setzt.
\( \Phi_{\tau}^{q} \) = Transponierung der Zwangsbedingungs-Jacobi-Matrix.
Der Vektor "Unbekannt" (die Werte, die der Solver berechnet):
q̈ = die generalisierten Beschleunigungen der Körper im System.
\( \lambda \) = Lagrange-Multiplikatoren als Vektor, der die Zwangsbedingungskräfte darstellt. Dies sind die unbekannten Kräfte und Drehmomente auf die Verbindungen zwischen den Körpern.
Kraft- und Bedingungsvektor (rechter Vektor):
Q = Allgemeine angewendete Kräfte, einschließlich Schwerkraft, Feder- und Dämpferkräfte, Aktor- und Motorkräfte sowie Coriolis- und Zentrifugalkräfte.
\( \Upsilon \)= Beschleunigungsbedingungen, einschließlich Geschwindigkeiten und fixierten Positionen.
Industrielle Anwendungen zur MBD-Simulation
In vielen Branchen werden Produkte hergestellt, die Mehrkörpersysteme sind und aus Komponenten bestehen, die sich relativ zueinander bewegen und Kräfte zwischen Körpern übertragen. Im Folgenden finden Sie fünf Beispiele aus der Praxis, bei denen Maschinenbauingenieur*innen eine MBD-Simulation verwenden, um die Systemdynamik der Produkte zu verstehen, die sie konstruieren und warten.
Industriemaschinen
Komplexe Mechanismen steuern viele Fertigungs- und Materialbearbeitungsmaschinen, sodass Maschinenbauingenieur*innen, die sie konstruieren, auf die Simulation der Mehrkörperdynamik angewiesen sind. Ingenieur*inn*e*n verwenden MBD-Modelle, um praktisch Prototypen von Funktionen zu erstellen. Sie verwenden das Modell, um sicherzustellen, dass Teile keinen unerwünschten Kontakt herstellen, um die Größe von Motoren und Stellgliedern zu bestimmen und um zyklische Lasten auf Komponenten zu berechnen, und so die Materialermüdung zu schätzen. Sie nutzen die Modelle auch, um die Effizienz des Systems zu optimieren, indem sie Eingabeparameter und Geometrie anpassen, um den Durchsatz zu erhöhen. Ingenieur*inn*e*n können Steuerungssoftware auch mit einem MBD-Modell verbinden, um das gesamte System virtuell zu testen.
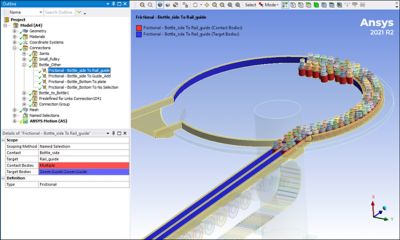
Ein Beispiel für ein Flaschensortiersystem, das in der Simulationssoftware für die Mehrkörperdynamik von Ansys Motion modelliert wurde.
Aufhängungen in Fahrzeugen
Autos sind voller Mechanismen, die von MBD-Simulationen profitieren. Tatsächlich waren Automobilingenieur*inn*e*n unter den ersten, die den MBD-Simulationsansatz anwendeten. Fahrzeugaufhängungen mit komplexen Gestängen, Federn und Dämpfern, die die dynamischen Lasten des Fahrens auf unebenen Straßen absorbieren und glätten, sind ideal für Mehrkörpern-Dynamik. Diese Art von Simulation ist zu einem wesentlichen Bestandteil von NVH-Studien (Noise, Vibration, Harshness = Geräusche, Vibrationen und Rauheit) geworden, mit dem Ziel, Fahrern und Beifahrern ein angenehmes Erlebnis zu bieten.
Raumschiff
MBD-Simulation ist ein wichtiges Werkzeug für Luft-/Raumfahrtingenieur*inn*e*n bei der Konstruktion von Raumfahrttechnik, da sich auf der Erde Bewegung und Last solcher Systeme in der Schwerelosigkeit nur schwer testen lassen. Einige typische Beispiele sind die kardanische Aufhängung, die die Schubrichtung eines Raketenmotors anpasst, der Auslösemechanismus eines Solarmoduls und die Motoren und Ventile, die in Flüssigmotoren oder Kühlsystemen verwendet werden.
Robotik
Roboter sind möglicherweise die direkteste reale Darstellung dynamischer Mehrkörpersysteme. Sie bestehen aus starren Körpern, die durch Gelenke verbunden sind und von Motoren und linearen Stellgliedern angetrieben werden. Viele Roboterprogrammierungssysteme verfügen über integrierte MBD-Solver, um genaue Simulationen in den Programmierworkflow einzubinden. Genau wie bei Industriemaschinen besteht das Ziel der Mehrkörper-Dynamiksimulation hier darin, mögliche Kollisionen zu erkennen, Lasten zu berechnen, die Ermüdungslebensdauer zu bestimmen und die Geschwindigkeit zu optimieren.
Eine Animation eines Roboters, der mit der MBD-Simulationssoftware von Ansys Motion modelliert wurde.
Biomechanik
Unsere eigenen Körper sind ebenfalls großartige Beispiele für dynamische Mehrkörpersysteme. Unsere Muskeln wirken wie Betätigungselemente, die an Sehnen ziehen, die Knochen um die Gelenke bewegen und eine Drehung um eine (Knöchel), zwei (Handgelenk) oder drei Achsen (Hüfte) ermöglichen. Biomedizinische Ingenieur*inn*e*n nutzen MBD-Simulationen, um die Leistung eines Athleten oder das Design künstlicher Gelenke und medizinischer Geräte für die Physiotherapie zu optimieren oder auch Teile des Körpers starr zu halten, um die Erholung von Brüchen und Verstauchungen zu unterstützen.
MBD-Symulation – physikalische Merkmale
Im Folgenden finden Sie eine Liste der am häufigsten verwendeten Begriffe zur Beschreibung der physikalischen Eigenschaften von Mehrkörper-Dynamikmodellen.
- Freiheitsgrad: Position und Ausrichtung eines Punkts im Modell. Ein starrer Körper im 3D-Raum bietet sechs Freiheitsgrade: Die drei Verschiebungen entlang der drei Achsen (x, y, z) und die drei Rotationen um die drei Achsen (rotx, roty, rotz).
- Kinematik: Die Beschreibung der linearen Bewegung und der Rotationsbewegung ohne Berücksichtigung von Kräften und damit von Masse und Impuls.
- Dynamik: Die Beschreibung der Bewegung über die Zeit unter Berücksichtigung der Kräfte und damit der Masse und des Moments.
- Masse: Der Widerstand eines Objekts gegen lineare Beschleunigung.
- Trägheitsmoment: Widerstand eines Objekts gegen Winkelbeschleunigung.
- Massenmittelpunkt: Die durchschnittliche Position der Masse in einem Objekt. Sie stellt einen einzelnen Punkt dar, an dem sich die gesamte Masse konzentriert.
- Masseneigenschaften: Masse, Trägheitsmomente und Massenmittelpunkt eines Körpers.
- Dynamische Kräfte: Externe und interne Kräfte, die auf die Objekte im System wirken. Beispiele für dynamische Kräfte sind Schwerkraft, Federn, Dämpfer, Stellglieder, Motoren, und Reibung sowie Coriolis- und Zentrifugalkräfte. In einigen Fällen, wie bei Dämpfung oder Feder, kann die Kraft von der Position oder Geschwindigkeit des Objekts abhängen.
- Beschränkung: Ein definierter Wert für die Position, Geschwindigkeit oder Beschleunigung eines Freiheitsgrads.
- Zwangsbedingungsgleichungen: Eine Formulierung, die Position, Geschwindigkeit oder Beschleunigung von zwei oder mehr Freiheitsgraden in Beziehung setzt.
Begriffe für die Modellierung von MBD-Simulationen
Ingenieur*inn*e*n verwenden die folgenden Begriffe, um verschiedene Teile ihrer MBD-Modelle zu beschreiben.
- Starrkörper: Ein idealisiertes Objekt, das sich nicht verformt, wenn eine Last angelegt wird. Eine mathematische Methode, einen Starrkörper zu betrachten, besteht darin, dass sich der Abstand zwischen zwei beliebigen Punkten nie ändert.
- Flexibler Körper: Ein Objekt, das sich verformt, wenn eine Last angelegt wird. MBD-Tools verwenden verschiedene Algorithmen, um diese Flexibilität auf vereinfachte oder detaillierte Weise darzustellen.
- Verbindungen: Eine Beziehung zwischen zwei Objekten, die die relative Bewegung (Verbindungen) oder Kräfte (Kontrollgeräte) zwischen Körpern im Modell definieren.
- Verbindungen: Eine Verbindung zwischen zwei Objekten, die Bedingungen zwischen Freiheitsgraden festlegt. Ein Drehgelenk ermöglicht beispielsweise eine Drehung um eine einzelne Achse, aber keine relative Verschiebung und keine Drehung um die andere Achse.
- Kontrollgeräte: Ein Algorithmus, der eine Kraft zwischen zwei Körpern oder einem Körper und dem Boden definiert. Kontrollgeräte können Motoren, Stellglieder, Dämpfer, Zahnräder oder Federn sein.
- Randbedingungen: Eine definierte Bewegung in Form einer Position, Geschwindigkeit oder Beschleunigung.
- Knoten: Ein Punkt im Modell, an dem der Solver Gleichungen und Lösungen für Verbindungen, Kräfte, Verschiebungen und Rotationen berechnet.
- Lasten: Eine interne oder externe Kraft oder ein Drehmoment, die oder das auf einen Gegenstand einwirkt.
- Kontakt: Die Interaktion zweier Körper, wenn sie sich berühren, und Kontaktkräfte werden zwischen ihnen übertragen. In einer dynamischen Analyse verhindert eine Kontaktspezifikation, dass ein Körper in einen anderen eindringt.
- Sensoren: Ein simuliertes Gerät im Modell, das ein physikalisches Merkmal im Modell misst und meldet. Beispiele sind der Abstand zwischen zwei Knoten, die Reaktionskräfte und Drehmomente an einem Gelenk sowie die Linear- und Drehpositionen, Geschwindigkeiten und Beschleunigungen eines Körpers. Sensoren werden auch während einer Simulation verwendet, um Werte zu berechnen, die von Steuergeräten zur Berechnung von Lasten verwendet werden.
Vorschläge zur Steuerung von Konstruktionen mit MBD-Simulation
Jedes System, das Mechanismen enthält, kann während des Konstruktionsprozesses von der Simulation der Mehrkörperdynamik profitieren. Es könnte sich um eine einfache kinematische Studie handeln, die sicherstellt, dass sich alles richtig bewegt, oder um eine komplexe nichtlineare Dynamiksimulation mit Kontakt, nichtlinearen Federn und komplexer Steuerungssoftware für Schrittmotoren.
Die wichtigste Empfehlung für den Erfolg bei der MBD-Modellierung ist die Wahl eines robusten, präzisen und schnellen Mehrzweck-MBD-Tools wie Ansys Motion MBD-Simulationssoftware. Die Auswahl eines Tools, das einfach zu bedienen ist, in CAD integriert ist und erweiterte Funktionen bietet, schränkt die Möglichkeiten der Produktsimulation nicht ein.
Es ist ebenfalls wichtig, sich Zeit für die Planung des Modells zu nehmen. Die folgenden Schritte sind ein guter Anfang, um zu dokumentieren, was für die Erstellung einer wertvollen und robusten MBD-Simulation erforderlich ist:
- Festlegen, was das Ziel des MBD-Modells ist
- Zuordnen der Baugruppe
- Identifizieren starrer und flexibler Körper
- Festlegen, welche Methoden die flexiblen Körper darstellen sollen
- Definieren der Verbindungen und Kontrollgeräte
- Platzieren der Sensoren, um Informationen während und nach der Lösung abzurufen
Es empfiehlt sich auch, zu prüfen, ob die ausgewählte MBD-Simulationssoftware über anwendungsspezifische Workflows verfügt, die das Einrichten und Nachbearbeiten von Modellen erheblich vereinfachen. Die Ansys Motion-Software enthält beispielsweise Anwendungen wie das Drivetrain Toolkit, das Car Toolkit und das Links Toolkit zum Modellieren von Ketten, Riemen und Gleisketten.
MBD-Modelle können auch die Simulation auf Systemebene in einem Tool wie der modellbasierten Systementwicklungssoftware Ansys Model Center unterstützen, indem sie sie mit dem MATLAB/SIMULINK-Kontrollmodell verbinden oder Modelle reduzierter Ordnung in der Digitaler-Zwillings-Software Ansys TwinAI erstellen.
Zugehörige Ressourcen
Los geht's
Wenn Sie mit technischen Herausforderungen konfrontiert sind, ist unser Team für Sie da. Mit unserer langjährigen Erfahrung und unserem Engagement für Innovation laden wir Sie ein, sich an uns zu wenden. Lassen Sie uns zusammenarbeiten, um Ihre technischen Hindernisse in Chancen für Wachstum und Erfolg zu verwandeln. Kontaktieren Sie uns noch heute, um das Gespräch zu beginnen.