
高级驾驶辅助系统(ADAS)与自动驾驶汽车(AV)技术正在深刻影响我们的驾驶方式。据估计,仅2023年,14项ADAS功能中就有10项实现了超过50%的市场渗透率。然而,自动驾驶技术的持续成功,取决于准确可靠的传感器系统及其检测弱势道路使用者(VRU,包括行人和骑手)的能力。
此外,随着安全法规的不断出台,制造商面临着一项艰巨任务:在降低雷达传感器成本的同时满足日益严苛的安全要求。其中包括NHTSA FMVSS 127,该法规要求所有车辆细分市场将自动紧急制动(AEB)作为标准功能。
对于NHTSA FMVSS 127法规,原始设备制造商(OEM)和一级供应商面临的挑战在于,在高性能雷达设备中同时满足安全性和成本要求。
调频连续波(FMCW)雷达正是此类挑战的解决方案之一,因为其能以更低成本实现足够的远程探测能力。但是,该技术会引入相位噪声,即雷达信号中微小的随机偏差。这些短期的随机波动会降低雷达系统性能,进而影响车辆安全性。
为了解决此问题,Ansys AVxcelerate Sensors 2025 R2版自动驾驶汽车仿真软件推出了一项新的相位噪声建模功能,支持在真实条件下对FMCW等雷达系统进行更精准的测试。
相位噪音的影响
FMCW雷达对于VRU检测至关重要。但其应用可能会导致本地振荡器(LO)信号相位变化不稳定或随机波动,从而产生相位噪声。
相位噪声源于雷达传感器中电压控制振荡器(VCO)生成线性调频信号时的微小相位偏差。这些偏差会在雷达信号中产生旁瓣,容易捕获到不希望出现的辐射模式。在雷达探测过程中,这些旁瓣扫描会掩蔽小型物体,尤其是在远距离探测时。
例如,在大型卡车附近检测行人等场景中,相位噪声可能会导致漏检,从而引发严重的安全风险。
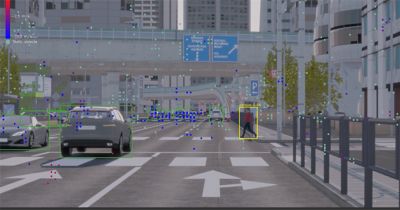
ADAS和AV应用中的雷达传感器旨在检测各种物体,包括行人和骑手等弱势道路使用者,即使在高速公路或低能见度城市环境等复杂条件下,也能够实现探测。
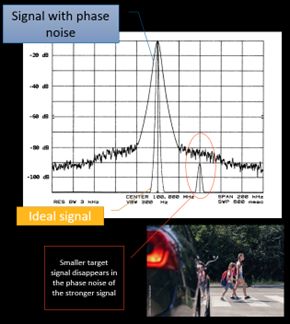
由于大信号相位噪声掩蔽而导致漏检目标
为了确保雷达系统在实际条件下高效运行,开发过程中必须考虑相位噪声。对雷达感知进行测试,需要采用适合仿真环境的全面性能分析。过度理想化的仿真会忽略相位噪声和其他环境缺陷,无法再现这些实际条件,从而导致性能评估不准确。
例如,在没有噪声或干扰的受控测试环境中,雷达传感器的性能可能看似完美。但在实际场景中,雷达信号的任何微小波动都会影响检测精度。
此类波动通常源于信号衰减、周围物体的多路径干扰或雷达单元内部的电子噪声等因素。因此,在未进行噪声建模的情况下,工程师开发的雷达系统可能在实际条件下表现不佳,从而影响安全性和性能,尤其是在紧急制动或碰撞避免等关键情况下。
利用Ansys对感知与相位噪声进行测试
相位噪声由功率谱密度(PSD)进行表征,PSD反映了噪声在频率范围内的分布情况。传感器制造商在雷达规格表中提供了此数据,使工程师能够在仿真中对相位噪声进行准确建模。
目前,主要有两种方法可以对这种噪声进行建模:
- 基座模型:直接使用规格表中的PSD数据进行仿真。
- 分段线性模型:使用测量的PSD数据进行更详细的仿真和传感器建模。
通过将相位噪声数据整合到Ansys AVxcelerate Sensors仿真环境中,制造商可确保雷达系统在真实驾驶条件下表现出色。我们还在该软件中引入了先进噪声模型,专门用于对相位噪声以及其他可能影响雷达性能的缺陷进行仿真。这些模型可帮助工程师在与真实环境高度相似的条件下测试雷达系统,其中噪声等缺陷会显著影响检测能力。
通过准确仿真相位噪声,Ansys AVxcelerate Sensors软件使制造商能够对雷达系统进行精细调整,以确保其在复杂动态环境中仍能可靠运行。
在不久的将来,随着ADAS和AV技术的广泛应用,几乎所有上路车辆都必须满足严格的车辆感知安全标准,包括FMVSS 127标准中对AEB系统的要求。当然,需要注意的是,在实现集成时要避免因采用更复杂的抗噪声雷达系统而增加成本。
在仿真环境中准确定位并处理相位噪声的能力,可确保雷达传感器能够在远距离探测小型物体,并在各种驾驶条件下(从高速公路到低能见度城市环境)实现最佳性能。凭借这些改进,制造商就可以构建更可靠、基于FMCW的雷达系统,既能满足安全法规要求,又能在成本敏感的车辆细分市场提供可靠的性能。
利用仿真打造安全的自动驾驶未来
要使雷达可靠地检测VRU,尤其是在高速驾驶等复杂环境中,就必须考虑相位噪声,否则可能会导致漏检,从而影响安全性。通过相位噪声仿真,制造商能够在雷达性能和成本效益之间取得平衡,从而确保即使是经济型车型也能符合FMVSS 127等法规安全标准。
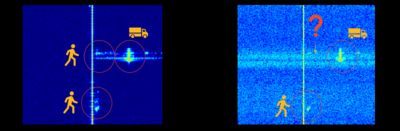
在未考虑噪声的雷达仿真中(左),第二个行人能够被准确检测。然而,当考虑热噪声和相位噪声时(右),第二行人未被检测到,这与真实测试中的表现一致。
FMCW雷达等低成本、高性能技术的成功应用,将成为满足安全法规和保护弱势道路使用者的关键,有助于为更安全的自动驾驶未来铺平道路。随着AVxcelerate Sensors 2025 R2版软件的发布,制造商现在可以更高效地对这些应用中相位噪声进行仿真,并构建能在真实条件下实现最佳性能的雷达系统。
进一步了解AVxcelerate Sensors软件。


Advantage博客
Ansys Advantage博客(The Advantage Blog)由Ansys专家和其他技术专家撰写,让您随时了解Ansys如何为创新赋能,推动人类踏上伟大征程。