Synopsys and Ansys power the future of innovation—connecting silicon to systems.
Ansys博客
October 24, 2019
仿真助力应对自动驾驶汽车三大测试挑战
自动驾驶汽车(AV)测试和验证,对于未来将其推向市场、满足消费者日常出行需求至关重要。
工程师需要让自动驾驶车辆满足严格的高标准,才能确保其安全投入道路使用。然而,基于物理原型的传统测试极为耗时,而且资金成本高昂。
事实上,据估计,需要通过80亿英里的测试,才能证明自动驾驶汽车比人类驾驶更安全。

因此,工程师需要借助虚拟测试
环境,以便在合理的时间范围内完成自动驾驶
汽车测试和验证
为了让完全自动驾驶汽车尽快成为现实,工程师需要利用基于物理的仿真和虚拟现实仿真来进行自动驾驶汽车测试。这些数字工具,将帮助工程师解决自动驾驶汽车设计测试和验证的三大挑战(下文将讨论)。
Ansys与AVSimulation合作,为工程师提供了有价值的工具。Ansys AVxcelerate驾驶仿真器,实现了仿真和虚拟现实(VR)的集成。
挑战1:高级场景
交通状况充满了不确定性。当自动驾驶汽车成为主流时,每天都可能会遇到各种独特的场景。
设想一下:对于个人驾驶者来说,遇到汽车闯红灯、逆行或突然撞上人行道的情况比较罕见。但当我们放眼全球道路交通,上述情况其实屡见不鲜。
然而,使用实车原型来测试自动驾驶汽车在这些场景下的反应是不切实际的。道路测试原型车难以遇到这些情况,并且人为部署这类场景既危险又成本高昂。

可见,自动驾驶汽车需要
针对独特的场景进行测试,
但实车原型在道路上并
不会经常遇到这些情况
相反,利用仿真技术,就可以在这些独特场景中测试和验证自动驾驶汽车。这些仿真测试快速且低成本,并能够避免对原型车、驾驶者和行人造成风险。
挑战2:日常交通、路况和标牌
工程师在测试自动驾驶系统时,既不能忽视日常驾驶中的普通场景,也不能忽视较少见的特殊场景。
在停车标志处停车已成为人类驾驶员的下意识的反应,即使实际场景有很多变化,他们也能自然应对。
天气、道路和交通状况,都会影响在停车标志处的实际停车方式。

针对各种交通场景组合的自动驾驶汽车测试和
验证
甚至汽车的发动机和轮胎,也会增加变量。人类通常很擅长应对不同的交通场景,
而对于由人工智能(AI)控制的车辆,想要应对这些场景并不容易。它们需要针对该停车标志场景的所有可能组合情况进行测试。
然而,对这些场景进行物理测试也可能会对人类生命和设备造成风险。此外,对所有这些场景进行综合测试所涉及的重复工作可能会导致人为错误。
因此,工程师可以利用参数化、仿真和虚拟现实,探索自动驾驶汽车的有效性范围。通过这种方式,计算机可以在极短的时间内自动运行多种停车标志场景。
挑战3:传感器和传感器阵列
自动驾驶汽车需要通过各种传感器来全面感知周围环境,这些传感器包括摄像头、激光雷达、雷达、热成像摄像头等,
而测试在某些场景下单个或多个传感器失效的情况,是一大挑战。
利用仿真技术测试自动驾驶汽车、对故障传感器进行建模,可以确定自动驾驶汽车将如何处理上述失效情况(比如前置摄像头失效等),工程师从而可以快速确定自动驾驶汽车是否具有功能安全性。
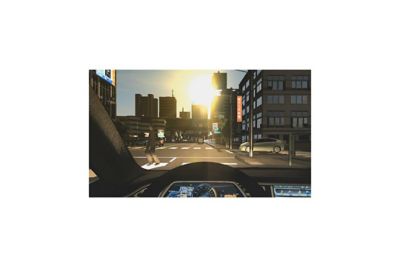
眩光会影响自动驾驶汽车中的各种传感器
。可以通过仿真
在这些条件下对传感器阵列进行测试和验证
软件助力工程师开展自动驾驶汽车测试
Ansys与AVSimulation之间的战略合作,旨在更快速安全地实现自动驾驶汽车的开发、测试和验证。
关键在于Ansys AVxcelerate仿真和虚拟现实工具。
进一步了解Ansys自动驾驶汽车仿真解决方案。